
Page 236 - Mechatronics for Safety, Security and Dependability in a New Era
P. 236
Ch45-I044963.fm Page 220 Tuesday, August 1, 2006 3:55 PM
Ch45-I044963.fm
220
220 Page 220 Tuesday, August 1, 2006 3:55 PM
directions around the neighboring edge pixels is defined as the curvature of the edge pixel [Saitoh03].
If many curvatures that have similar values to ones registered in the template table are included in an
objective image, some wrong votes may be executed and the reliability of matching may decrease in
the case of by using a single curvature. To solve this problem, the proposed method uses two kinds of
curvature co s and m L that are measured in two sizes of areas in order to improve the reliability. In this
method, a>s and coi is called pair of curvatures. The parameters cosj and a>u are invariant to change of
two-dimensional inclination and treated as the matching key. The other parameters are treated as pose
date to determine a position and an inclination of a target image.
Curvature: o) s,i, ft);,./
edge
direction
Figure 2: Relation between edge pixel and candidate of base pixels
In the matching phase, the edge directions and the curvatures of all edge pixels detected in an
objective image are measured. The template table is referred by using the curvature of the edge pixels
in the objective image. When a pair of curvatures between in the template table and in the objective
image are similar, the address (x/,, >>/,) to be vote is calculated using the geometrical parameters in the
template table as shown in Fig. 2. The value of the address in the voting space is incremented as the
voting process and the candidate for inclination is stored into the vote log. This process is repeated at
all edge pixels in the objective image and the position of the target image area is determined by the
address with the maximum voted value in the voting space. The inclination of the target image area is
obtained from the peak in the histogram that is generated by the vote log.
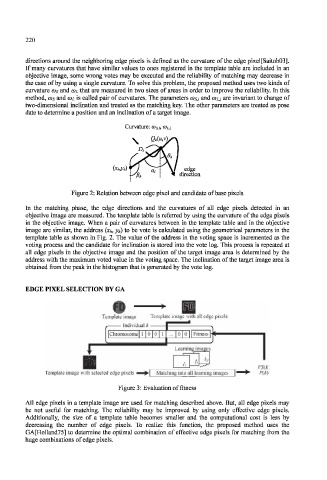
EDGE PIXEL SELECTION BY GA
Template image Template image with all edge pixels
• Individual k
Chromosome 1 0 0 1
VS(k)
Template image with selected edge pixels Matching into all learning images P(k)
Figure 3: Evaluation of fitness
All edge pixels in a template image are used for matching described above. But, all edge pixels may
be not useful for matching. The reliability may be improved by using only effective edge pixels.
Additionally, the size of a template table becomes smaller and the computational cost is less by
decreasing the number of edge pixels. To realize this function, the proposed method uses the
GA[Holland75] to determine the optimal combination of effective edge pixels for matching from the
huge combinations of edge pixels.