
Page 419 - Mechatronics for Safety, Security and Dependability in a New Era
P. 419
Ch81-I044963.fm Page 403 Tuesday, August 1, 2006 4:54 PM
Tuesday, August
Page 403
4:54 PM
Ch81-I044963.fm
1, 2006
403
403
static and dynamic friction, and to be able to design good quality acceleration and jerk based
controllers.
MOVEMENT RESTITUTION ALGORITHM
In order to give to the driver the illusion of feeling the inertial effects of the simulated vehicle, the
platform is powered by a washout algorithm. A washout algorithm aims to feedback transient
accelerations, considering the kinematics and the mechanical/dynamic limitations of the platform
(workspace, robustness, bandwidth, etc.). Transient acceleration is obtained by filtering the simulated
acceleration signal through a high-pass filter in order to isolate the high frequency component. In this
way, the signal collected has non-zero acceleration in the acceleration variation phase and zero
acceleration in the continuous acceleration phase. After having filtered the acceleration, the signal
produced is integrated twice in order to obtain the desired position profile. Another high-pass filter is
integrated for bringing the platform back to its neutral position (fig 2). This is commonly referred to as
"washout". The time constant of this filter must be chosen as to allow the platform returning to its
initial position under vestibular system's movement perception threshold constraint.
Filtering Washout filter
Filtering
Washout filter
H ∫∫ H platform
Actuator
Vehicle dynamic model
High pass-filter
Vehicle dynamic model High pass-filter High pass-filter Actuator
High pass-filter
platform
Linear acceleration
Linear acceleration Position
Position
Figure 2: Washout restitution movement algorithm
The mini-simulator mounted on the mobile platform is derived from work carried out jointly between
INRETS, LSC and Faros Company. The steering wheel is equipped with haptic feedback (Mohellebi
et al. (2005)). Virtual scene rendering is carried out on screens or monitors (up to 150° according to
2
the configuration). The simulator uses INRETS SIM software. Traffic simulation, 3D sound rendering,
and scenarios administrator are computed by INRETS ARCHISIM software. The vehicle model used
comes from the CNRS CEPA research laboratory.
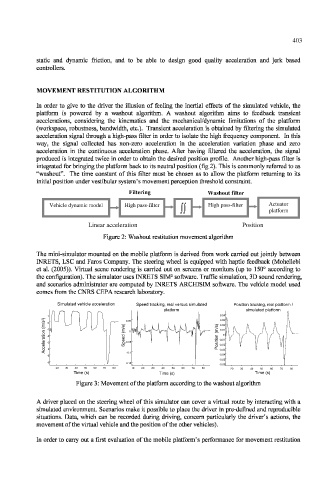
Simulated vehicle acceleration
Simulated vehicle acceleration Speed tracking, real versus simulated Position tracking, real platform /
Speed tracking, real versus simulated
Position tracking, real platform /
platform simulated platform
simulated platform
platform
0.04
1
)
² 0.03
s 0.05
/ 0 )
m s ) s 0.02
( / /
-1 m m 0.01
n ( 0 (
o
i t -2 d n 0
a e o
r e i -0.01
e -3 p -0.05 t i
l s
e S o -0.02
c P
c -4 -0.03
A -0.1
-5 -0.04
-0.05
-6 -0.15
-0.06
60
50
20 20 30 30 40 40 50 60 70 70 80 10 20 30 40 50 60 70 80 20 20 30 40 40 50 50 60 60 70 70 80 80
30
Time (s)
Time (s)
Time (s) Time (s) Time (s)
Figure 3: Movement of the platform according to the washout algorithm
A driver placed on the steering wheel of this simulator can cover a virtual route by interacting with a
simulated environment. Scenarios make it possible to place the driver in pre-defined and reproducible
situations. Data, which can be recorded during driving, concern particularly the driver's actions, the
movement of the virtual vehicle and the position of the other vehicles).
In order to carry out a first evaluation of the mobile platform's performance for movement restitution