
Page 435 - Mechatronics for Safety, Security and Dependability in a New Era
P. 435
Ch84-I044963.fm Page 419 Tuesday, August 1, 2006 5:00 PM
Tuesday, August
5:00 PM
1, 2006
Page 419
Ch84-I044963.fm
419
419
monitoring computer search ball
Figure 4: Wireless communication between search ball and monitoring computer
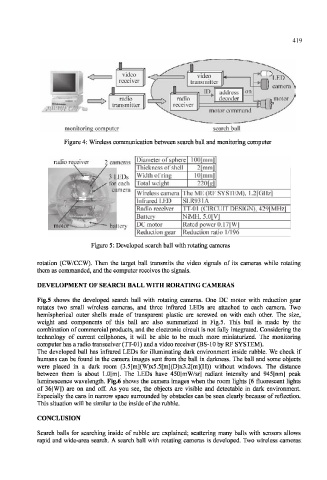
radio receiver cameras Diameter of sphere 100 [mm]
Thickness of shell 2 [mm]
3 LEDs Width of ring 10[mm]
for each Total weight 220[g]
camera
Wireless camera The ME (RF SYSTEM). 1.2 [GHz]
Infrared LED SLR931A
Radio receiver TT-01 (CIRCUIT DESIGN), 429[MHz]
Batteiy NiMH, 5.0[V]
motor battery DC motor Rated power 0.17[W]
Reduction gear Reduction ratio 1/196
Figure 5: Developed search ball with rotating cameras
rotation (CW/CCW). Then the target ball transmits the video signals of its cameras while rotating
them as commanded, and the computer receives the signals.
DEVELOPMENT OF SEARCH BALL WITH RORATING CAMERAS
Fig.5 shows the developed search ball with rotating cameras. One DC motor with reduction gear
rotates two small wireless cameras, and three infrared LEDs are attached to each camera. Two
hemispherical outer shells made of transparent plastic are screwed on with each other. The size,
weight and components of this ball are also summarized in Fig.5. This ball is made by the
combination of commercial products, and the electronic circuit is not fully integrated. Considering the
technology of current cellphones, it will be able to be much more miniaturized. The monitoring
computer has a radio transceiver (TT-01) and a video receiver (BS-10 by RF SYSTEM).
The developed ball has infrared LEDs for illuminating dark environment inside rubble. We check if
humans can be found in the camera images sent from the ball in darkness. The ball and some objects
were placed in a dark room (3.5[m](W)x5.5[m](D)x3.2[m](H)) without windows. The distance
between them is about 1.0[m]. The LEDs have 450[mW/sr] radiant intensity and 945[nm] peak
luminescence wavelength. Fig.6 shows the camera images when the room lights (6 fluorescent lights
of 36[W]) are on and off. As you see, the objects are visible and detectable in dark environment.
Especially the cans in narrow space surrounded by obstacles can be seen clearly because of reflection.
This situation will be similar to the inside of the rubble.
CONCLUSION
Search balls for searching inside of rubble are explained; scattering many balls with sensors allows
rapid and wide-area search. A search ball with rotating cameras is developed. Two wireless cameras