
Page 436 - Mechatronics for Safety, Security and Dependability in a New Era
P. 436
Ch84-I044963.fm Page 420 Tuesday, August 1, 2006 5:00 PM
Ch84-I044963.fm
420
420 Page 420 Tuesday, August 1, 2006 5:00 PM
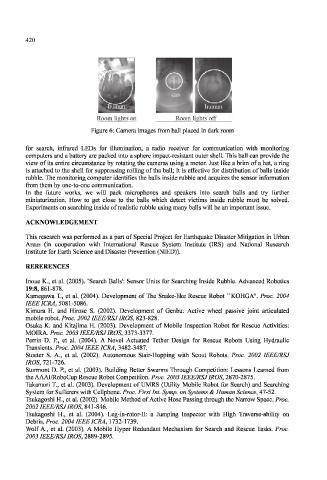
Room lights on Room lights off
Figure 6: Camera images from ball placed in dark room
for search, infrared LEDs for illumination, a radio receiver for communication with monitoring
computers and a battery are packed into a sphere impact-resistant outer shell. This ball can provide the
view of its entire circumstance by rotating the cameras using a motor. Just like a brim of a hat, a ring
is attached to the shell for suppressing rolling of the ball; it is effective for distribution of balls inside
rubble. The monitoring computer identifies the balls inside rubble and acquires the sensor information
from them by one-to-one communication.
In the future works, we will pack microphones and speakers into search balls and try further
miniaturization. How to get close to the balls which detect victims inside rubble must be solved.
Experiments on searching inside of realistic rubble using many balls will be an important issue.
ACKNOWLEDGEMENT
This research was performed as a part of Special Project for Earthquake Disaster Mitigation in Urban
Areas (in cooperation with International Rescue System Institute (IRS) and National Research
Institute for Earth Science and Disaster Prevention (NIED)).
RERERENCES
Inoue K., et al. (2005). 'Search Balls': Sensor Units for Searching Inside Rubble. Advanced Robotics
19:8,861-878.
Kamegawa T., et al. (2004). Development of The Snake-like Rescue Robot "KOHGA". Proc. 2004
IEEEICRA, 5081-5086.
Kimura H. and Hirose S. (2002). Development of Genbu: Active wheel passive joint articulated
mobile robot. Proc. 2002 IEEE/RSJIROS, 823-828.
Osuka K. and Kitajima H. (2003). Development of Mobile Inspection Robot for Rescue Activities:
MOIRA. Proc. 2003 IEEE/RSJ IROS, 3373-3377.
Perrin D. P., et al. (2004). A Novel Actuated Tether Design for Rescue Robots Using Hydraulic
Transients. Proc. 2004 IEEEICRA, 3482-3487.
Stoeter S. A., et al. (2002). Autonomous Stair-Hopping with Scout Robots. Proc. 2002 IEEE/RSJ
IROS, 721-726.
Stormont D. P., et al. (2003). Building Better Swarms Through Competition: Lessons Learned from
the AAAI/RoboCup Rescue Robot Competition. Proc. 2003 IEEE/RSJ IROS, 2870-2875.
Takamori T., et al. (2003). Development of UMRS (Utility Mobile Robot for Search) and Searching
System for Sufferers with Cellphone. Proc. First Int. Symp. on Systems & Human Science, 47-52.
Tsukagoshi H., et al. (2002). Mobile Method of Active Hose Passing through the Narrow Space. Proc.
2002 IEEE/RSJ IROS, 841-846.
Tsukagoshi H., et al. (2004). Leg-in-rotor-II: a Jumping Inspector with High Traverse-ability on
Debris. Proc. 2004 IEEE ICRA, 1732-1739.
Wolf A., et al. (2003). A Mobile Hyper Redundant Mechanism for Search and Rescue Tasks. Proc.
2003 IEEE/RSJ IROS, 2889-2895.