
Page 279 - Microsensors, MEMS and Smart Devices - Gardner Varadhan and Awadelkarim
P. 279
MECHANICAL SENSORS 259
capacitors and the output voltage is related to the deflection of the membrane A* and
hence the applied pressure (P — P 0).
V out a AC a AJC a (P - P 0) (8.33)
In this case, the accurate positioning of the pickup electrodes is crucial.
By controlling the background pressure P 0, it is possible to fabricate the following
basic types of pressure sensors:
• An absolute pressure sensor that is referenced to a vacuum (P 0 = 0)
• A gauge-type pressure sensor that is referenced to atmospheric pressure (P 0 = 1 atm)
• A differential or relative type (P 0 is constant).
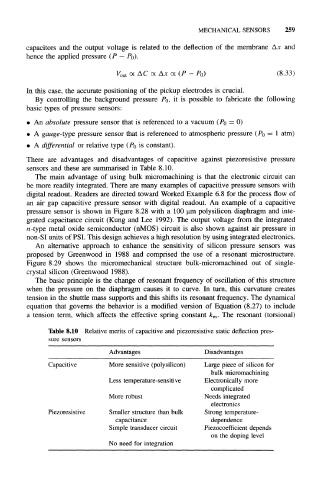
There are advantages and disadvantages of capacitive against piezoresistive pressure
sensors and these are summarised in Table 8.10.
The main advantage of using bulk micromachining is that the electronic circuit can
be more readily integrated. There are many examples of capacitive pressure sensors with
digital readout. Readers are directed toward Worked Example 6.8 for the process flow of
an air gap capacitive pressure sensor with digital readout. An example of a capacitive
pressure sensor is shown in Figure 8.28 with a 100 urn polysilicon diaphragm and inte-
grated capacitance circuit (Kung and Lee 1992). The output voltage from the integrated
n-type metal oxide semiconductor (nMOS) circuit is also shown against air pressure in
non-Si units of PSI. This design achieves a high resolution by using integrated electronics.
An alternative approach to enhance the sensitivity of silicon pressure sensors was
proposed by Greenwood in 1988 and comprised the use of a resonant microstructure.
Figure 8.29 shows the micromechanical structure bulk-micromachined out of single-
crystal silicon (Greenwood 1988).
The basic principle is the change of resonant frequency of oscillation of this structure
when the pressure on the diaphragm causes it to curve. In turn, this curvature creates
tension in the shuttle mass supports and this shifts its resonant frequency. The dynamical
equation that governs the behavior is a modified version of Equation (8.27) to include
a tension term, which affects the effective spring constant k m. The resonant (torsional)
Table 8.10 Relative merits of capacitive and piezoresistive static deflection pres-
sure sensors
Advantages Disadvantages
Capacitive More sensitive (polysilicon) Large piece of silicon for
bulk micromachining
Less temperature-sensitive Electronically more
complicated
More robust Needs integrated
electronics
Piezoresistive Smaller structure than bulk Strong temperature-
capacitance dependence
Simple transducer circuit Piezocoefficient depends
on the doping level
No need for integration