
Page 364 - Modern Control Systems
P. 364
338 Chapter 5 The Performance of Feedback Control Systems
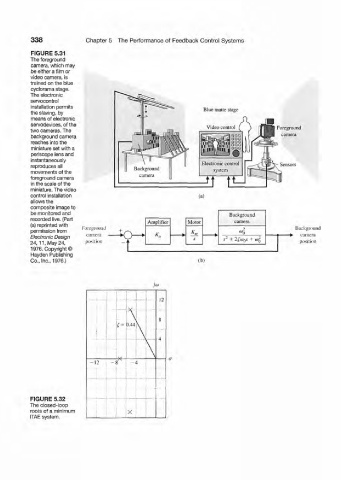
FIGURE 5.31
The foreground
camera, which may
be either a film or
video camera, is
trained on the blue
cyclorama stage.
The electronic
servocontrol
installation permits
the slaving, by
means of electronic
servodevices, of the
two cameras. The Foreground
background camera camera
reaches into the
miniature set with a
periscope lens and
instantaneously
reproduces all Sensors
movements of the
foreground camera
in the scale of the
miniature. The video
control installation (a)
allows the
composite image to
be monitored and
recorded live. (Part Background
(a) reprinted with Amplifier Motor camera
permission from Foreground Background
Electronic Design JO— A K n -*• camera
24,11, May 24, position S + 2ftt)QS + (OQ position
1976. Copyright©
Hayden Publishing
Co., Inc., 1976.)
lb)
]0>
" 12
8
1» ).44
4
\
\/
-12
--
.... .—
FIGURE 5.32 i. —
The closed-loop
roots of a minimum X
ITAE system.