
Page 228 - Modern Control of DC-Based Power Systems
P. 228
192 Modern Control of DC-Based Power Systems
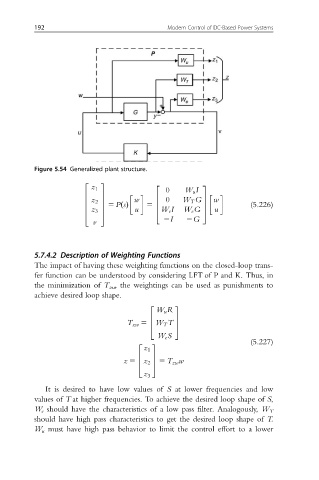
Figure 5.54 Generalized plant structure.
2 3
2 3
z 1 0 W u I
w 6 0 W T G 7 w
6 7
6 z 2 7 5 (5.226)
u 4 W e I W e G 5 u
7 5 PsðÞ 6 7
6
4 z 3 5
2I 2G
v
5.7.4.2 Description of Weighting Functions
The impact of having these weighting functions on the closed-loop trans-
fer function can be understood by considering LFT of P and K. Thus, in
the minimization of T zw , the weightings can be used as punishments to
achieve desired loop shape.
2 3
W u R
6 7
4
T zw 5 W T T 5
W e S
(5.227)
2 3
z 1
z 5 z 2 5 5 T zw w
6
7
4
z 3
It is desired to have low values of S at lower frequencies and low
values of T at higher frequencies. To achieve the desired loop shape of S,
W e should have the characteristics of a low pass filter. Analogously, W T
should have high pass characteristics to get the desired loop shape of T.
W u must have high pass behavior to limit the control effort to a lower