
Page 40 - Modern Control of DC-Based Power Systems
P. 40
Overview—Voltage Stabilization of Constant Power Loads 5
r L
I
R p P/V
E C V
C p
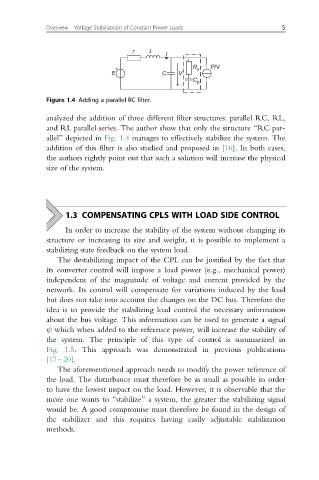
Figure 1.4 Adding a parallel RC filter.
analyzed the addition of three different filter structures: parallel RC, RL,
and RL parallel series. The author show that only the structure “RC par-
allel” depicted in Fig. 1.4 manages to effectively stabilize the system. The
addition of this filter is also studied and proposed in [16]. In both cases,
the authors rightly point out that such a solution will increase the physical
size of the system.
1.3 COMPENSATING CPLS WITH LOAD SIDE CONTROL
In order to increase the stability of the system without changing its
structure or increasing its size and weight, it is possible to implement a
stabilizing state feedback on the system load.
The destabilizing impact of the CPL can be justified by the fact that
its converter control will impose a load power (e.g., mechanical power)
independent of the magnitude of voltage and current provided by the
network. Its control will compensate for variations induced by the load
but does not take into account the changes on the DC bus. Therefore the
idea is to provide the stabilizing load control the necessary information
about the bus voltage. This information can be used to generate a signal
ψ which when added to the reference power, will increase the stability of
the system. The principle of this type of control is summarized in
Fig. 1.5. This approach was demonstrated in previous publications
[17 20].
The aforementioned approach needs to modify the power reference of
the load. The disturbance must therefore be as small as possible in order
to have the lowest impact on the load. However, it is observable that the
more one wants to “stabilize” a system, the greater the stabilizing signal
would be. A good compromise must therefore be found in the design of
the stabilizer and this requires having easily adjustable stabilization
methods.