
Page 130 - PDA Robotics Using Your Personal Digital Assistant to Control Your Robot
P. 130
PDA 05 5/30/03 11:35 AM Page 106
PDA Robotics
Laser Light
Tests with a laser pointer had results similar to those with the flash-
light; only a beam aimed straight into the sensor’s receiver would
cause a false reading. If the beam comes from even a few degrees off
center, it has no effect.
Operation
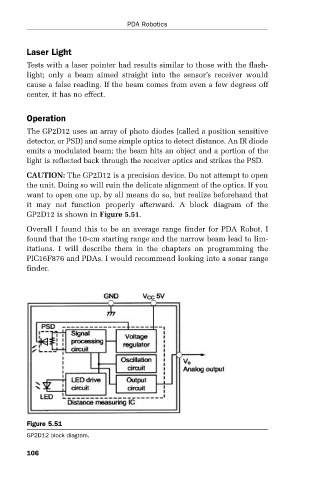
The GP2D12 uses an array of photo diodes (called a position sensitive
detector, or PSD) and some simple optics to detect distance. An IR diode
emits a modulated beam; the beam hits an object and a portion of the
light is reflected back through the receiver optics and strikes the PSD.
CAUTION: The GP2D12 is a precision device. Do not attempt to open
the unit. Doing so will ruin the delicate alignment of the optics. If you
want to open one up, by all means do so, but realize beforehand that
it may not function properly afterward. A block diagram of the
GP2D12 is shown in Figure 5.51.
Overall I found this to be an average range finder for PDA Robot. I
found that the 10-cm starting range and the narrow beam lead to lim-
itations. I will describe them in the chapters on programming the
PIC16F876 and PDAs. I would recommend looking into a sonar range
finder.
Figure 5.51
GP2D12 block diagram.
106