
Page 78 - Phase-Locked Loops Design, Simulation, and Applications
P. 78
MIXED-SIGNAL PLL ANALYSIS Ronald E. Best 55
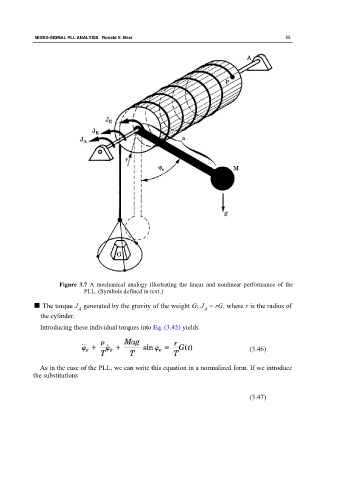
Figure 3.7 A mechanical analogy illustrating the linear and nonlinear performance of the
PLL. (Symbols defined in text.)
■ The torque J generated by the gravity of the weight G; J = rG, where r is the radius of
A A
the cylinder.
Introducing these individual torques into Eq. (3.45) yields
(3.46)
As in the case of the PLL, we can write this equation in a normalized form. If we introduce
the substitutions
(3.47)