
Page 463 - Pipelines and Risers
P. 463
430 Chapter 22
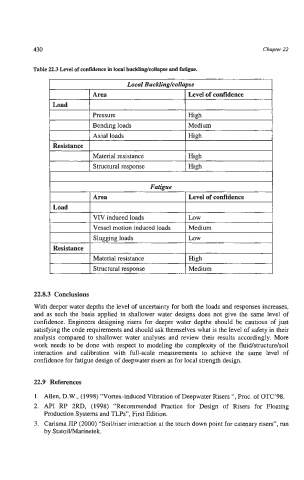
Table 223 Level of confidence in local bucklingkollapse and fatigue.
Local Backling/collupse
I Area 1 Level of confidence
Load
Pressure High
I I Bending loads I Medium
I Axial loads High
Resistance 1
Material resistance High
Structural response High
Area Level of confidence
Load
VlV induced loads LOW
Vessel motion induced loads Medium
Slugging loads LOW
Resistance
Material resistance High
Structural resuonse Medium
22.8.3 Conclusions
With deeper water depths the level of uncertainty for both the loads and responses increases,
and as such the basis applied in shallower water designs does not give the same level of
confidence. Engineers designing risers for deeper water depths should be cautious of just
satisfying the code requirements and should ask themselves what is the level of safety in their
analysis compared to shallower water analyses and review their results accordingly. More
work needs to be done with respect to modeling the complexity of the fluid/structure/soil
interaction and calibration with full-scale measurements to achieve the same level of
confidence for fatigue design of deepwater risers as for local strength design.
22.9 References
1. Allen, D.W., (1998) “Vortex-induced Vibration of Deepwater Risers “, Proc. of OTC’98.
2. API RP 2RD, (1998) “Recommended Practice for Design of Risers for Floating
Production Systems and TLPs”, First Edition.
3. Carisma .TIP (2000) “SoiVriser interaction at the touch down point for catenary risers”, run
by StatoiVMarinetek.