
Page 197 - Practical Control Engineering a Guide for Engineers, Managers, and Practitioners
P. 197
An Underdamped Precess 1n
s::
~ 2.--.--~--~---.--~--~--~--~-.,--.
cu
5 1.5
r 1
0.5
~
= 0
-~ ~.5~~--_.--~--~--~~~~--~--~~
>- 0 2 4 6 8 10 12 14 16 18 20
6 1.5 r-----r-~--r-----.r------,...-~--r----~---r------,
:d
~ 1
r 0.5
:§ 0
::
>- ~-5~~--~--_.--~--~--~--~--~~~~
0 2 4 6 8 10 12 14 16 18 20
Time
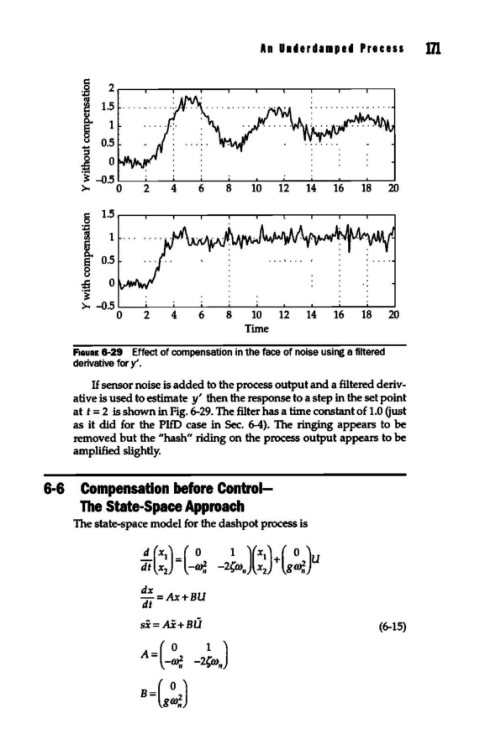
FacauRE 8-29 Effect of compensation in the face of noise using a filtered
derivative for y'.
If sensor noise is added to the process output and a filtered deriv-
ative is used to estimate y' then the response to a step in the set point
at t = 2 is shown in Fig. 6-29. The filter has a time constant of 1.0 Oust
as it did for the PlfD case in Sec. 6-4). The ringing appears to be
removed but the hash riding on the process output appears to be
11
11
amplified slightly.
6-6 Compensation before Control-
The State-Space Approach
The state-space model for the dashpot process is
M:}(-~ -~m.)(:}(g~)u
dx
-=Ax+BU
dt
sx=Ai+Bii (6-15)