
Page 28 - Practical Control Engineering a Guide for Engineers, Managers, and Practitioners
P. 28
Qualitative Coucepts iu Coutrol Engiueering 3
S (Set point)
r----- -----------------
1
I
I
I U (Controller output/
1 Controller J--i---___;_,
I I process input)
I I
I I
I I
I_ ---------------------
Process
Y (Process output) U (Process input)
L...---""1""'""--....1
D (Disturbances)-----'
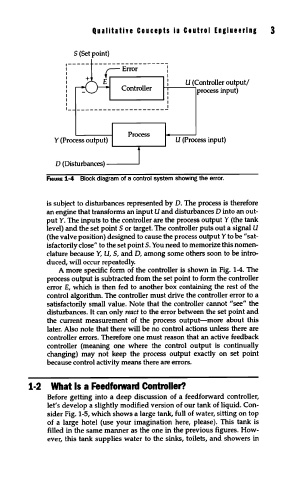
F1auRE 1-4 Block diagram of a control system showing the error.
is subject to disturbances represented by D. The process is therefore
an engine that transforms an input U and disturbances D into an out-
put Y. The inputs to the controller are the process output Y (the tank
level) and the set pointS or target. The controller puts out a signal U
(the valve position) designed to cause the process output Y to be "sat-
isfactorily close" to the set pointS. You need to memorize this nomen-
clature because Y, U, S, and D, among some others soon to be intro-
duced, will occur repeatedly.
A more specific form of the controller is shown in Fig. 1-4. The
process output is subtracted from the set point to form the controller
errorE, which is then fed to another box containing the rest of the
control algorithm. The controller must drive the controller error to a
satisfactorily small value. Note that the controller cannot "see" the
disturbances. It can only react to the error between the set point and
the current measurement of the process output-more about this
later. Also note that there will be no control actions unless there are
controller errors. Therefore one must reason that an active feedback
controller (meaning one where the control output is continually
changing) may not keep the process output exactly on set point
because control activity means there are errors.
1-2 What Is a Feedforward Controller?
Before getting into a deep discussion of a feedforward controller,
let's develop a slightly modified version of our tank of liquid. Con-
sider Fig. 1-5, which shows a large tank, full of water, sitting on top
of a large hotel (use your imagination here, please). This tank is
filled in the same manner as the one in the previous figures. How-
ever, this tank supplies water to the sinks, toilets, and showers in