
Page 29 - Practical Control Engineering a Guide for Engineers, Managers, and Practitioners
P. 29
4 Chapter One
~V,1h·L'
Ll'
~~
+
Faucets ,md toilets
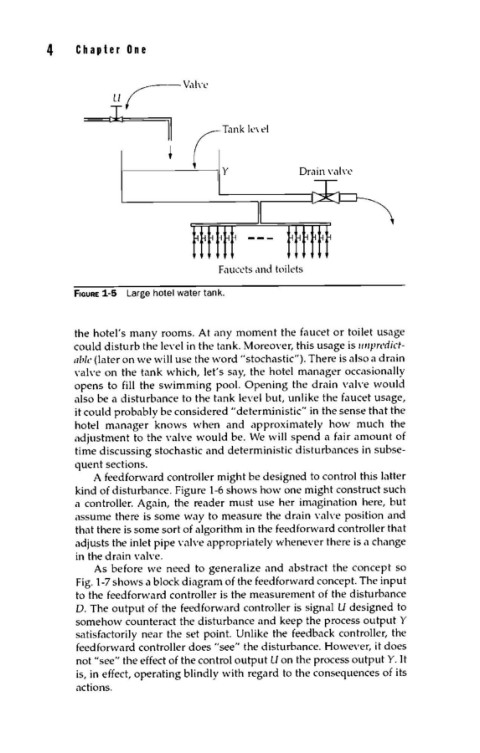
FrcuRE 1-5 Large hotel water tank.
the hotel's many rooms. At any moment the faucet or toilet usage
could disturb the level in the tank. Moreover, this usage is 1111prcdict-
aMc (later on we will use the word "stochastic"). There is also a drain
vah·e on the tank which, let's say, the hotel manager occasionally
opens to fill the swimming pool. Opening the drain valve would
also be a disturbance to the tank level but, unlike the faucet usage,
it could probably be considered "deterministic" in the sense that the
hotel manager knows \vhen and approximately how much the
adjustment to the valve would be. We will spend a fair amount of
time discussing stochastic and deterministic disturbances in subse-
quent sections.
A feedforward controller might be designed to control this latter
kind of disturbance. Figure 1-6 shows how one might construct such
a controller. Again, the reader must use her imagination here, but
assume there is some way to measure the drain vah·e position and
that there is some sort of algorithm in the feedforward controller that
adjusts the inlet pipe valve appropriately whenever there is a change
in the drain valve.
As before we need to generalize and abstract the concept so
Fig. 1-7 shows a block diagram of the feedforward concept. The input
to the feedforward controller is the measurement of the disturbance
D. The output of the feedforward controller is signal U designed to
somehow counteract the disturbance and keep the process output Y
satisfactorily near the set point. Unlike the feedback controller, the
feedforward controller does "see" the disturbance. Howe\'er, it does
not "see" the effect of the control output U on the process output Y. It
is, in effect, operating blindly with regard to the consequences of its
actions.