
Page 80 - Practical Control Engineering a Guide for Engineers, Managers, and Practitioners
P. 80
Basic Concepts in Process Analysis 55
1.4 .------r---~------.,...------r-------r-------.
1.2
1 ............. · ......... : ........ : ..
0
•
0
0
0.8
::s 0.6
0.4
0.2
00
5 10 15 20 25 30
1
] ~:: :t:·:.::: : ::::J-~ U:::: :::::::: ::-::::: :
>- 0.4 .: ..... ·:· ....... ·:· ....... ·:· ....... ! ....... ·:· ...... .
I
0.2 .......... 0 ....................................... 0 ••••
I
00 5 10 15 20 25 30
Time
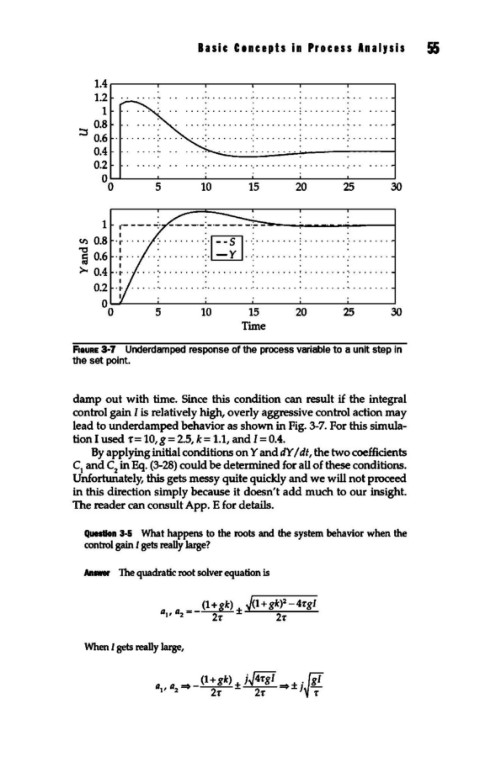
F1auRE 3-7 Underdamped response of the process variable to a unit step in
the set point.
damp out with time. Since this condition can result if the integral
control gain I is relatively high, overly aggressive control action may
lead to underdamped behavior as shown in Fig. 3-7. For this simula-
tion I used t'= 10, g = 2.5, k = 1.1, and I= 0.4.
By applying initial conditions on Y and dY I dt, the two coefficients
C and C in Eq. (3-28) could be determined for all of these conditions.
1 2
Unfortunately, this gets messy quite quickly and we will not proceed
in this direction simply because it doesn't add much to our insight.
The reader can consult App. E for details.
Question 3·5 What happens to the roots and the system behavior when the
control gain l gets really large?
Answer The quadratic root solver equation is
When l gets really large,