
Page 247 - Robot Builder's Bonanza
P. 247
216 MOVING YOUR ROBOT
Tracks Move forward Move backward
Idler
wheels
Drive
motors Figure 20- 9 Differential steering
using tracks is the same as with
wheels, except that, to make a turn,
one track needs to move in the
Idler
wheels opposite direction. If one track is
stopped, the robot may “skitter” in
Vehicle chassis
Turn left Turn right the turn or the tracks may pop off.
This method is often referred to as tank steering or skid steering, but at the end of the
day it’s the same as differential steering.
The main benefit of a tracked vehicle is its ability to navigate over rough terrain. The tracks
enhance the “grip of the road,” allowing the robot to travel over loose dirt, sand, grass, and
other surfaces that a wheeled robot can only dream about.
See Chapter 26, “Build Robots with Wheels and Tracks,” for additional information on track
FYI selection and use. You’ll also find several hands- on projects for building robots with tracks.
Locomotion Using Legs
Thanks to the ready availability of smart microcontrollers, along with the low cost of R/C
(radio- controlled) servos, legged automatons like the one in Figure 20- 10 are becoming a
popular alternative for robot builders. Robots with legs require more precise construction than
the average wheeled robot. They also tend to be more expensive.
Even a “basic” six- legged walking robot requires a minimum of 2 or 3 servos, with some
six- and eight- leg designs requiring 12 or more motors. At about $12 per servo (more for
powerful higher- quality ones), the cost can add up quickly!
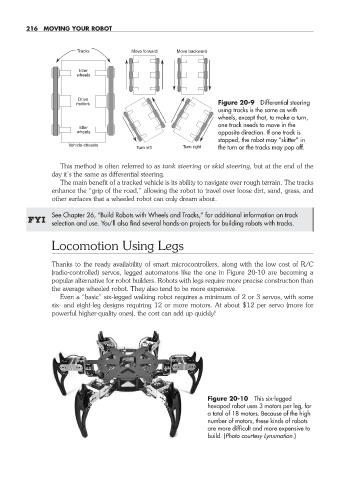
Figure 20- 10 This six- legged
hexapod robot uses 3 motors per leg, for
a total of 18 motors. Because of the high
number of motors, these kinds of robots
are more difficult and more expensive to
build. (Photo courtesy Lynxmotion.)
20-chapter-20.indd 216 4/21/11 11:50 AM