
Page 242 - Robot Builder's Bonanza
P. 242
LOCOMOTION USING WHEELS 211
Locomotion Using Wheels
The drive geometry for robots that use wheels is defined by how each one is steered. There
are a lot of choices.
DIFFERENTIAL STEERING
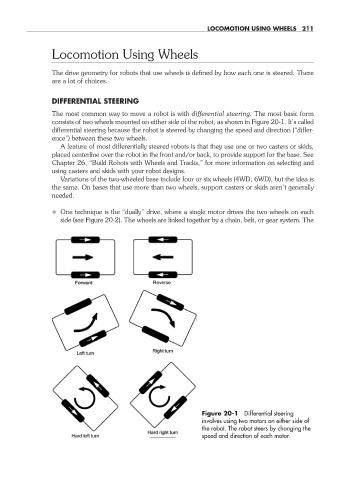
The most common way to move a robot is with differential steering. The most basic form
consists of two wheels mounted on either side of the robot, as shown in Figure 20- 1. It’s called
differential steering because the robot is steered by changing the speed and direction (“differ-
ence”) between these two wheels.
A feature of most differentially steered robots is that they use one or two casters or skids,
placed centerline over the robot in the front and/or back, to provide support for the base. See
Chapter 26, “Build Robots with Wheels and Tracks,” for more information on selecting and
using casters and skids with your robot designs.
Variations of the two- wheeled base include four or six wheels (4WD, 6WD), but the idea is
the same. On bases that use more than two wheels, support casters or skids aren’t generally
needed.
• One technique is the “dually” drive, where a single motor drives the two wheels on each
side (see Figure 20- 2). The wheels are linked together by a chain, belt, or gear system. The
Figure 20- 1 Differential steering
involves using two motors on either side of
the robot. The robot steers by changing the
speed and direction of each motor.
20-chapter-20.indd 211 4/21/11 11:50 AM