
Page 191 -
P. 191
174 Computed-Torque Control
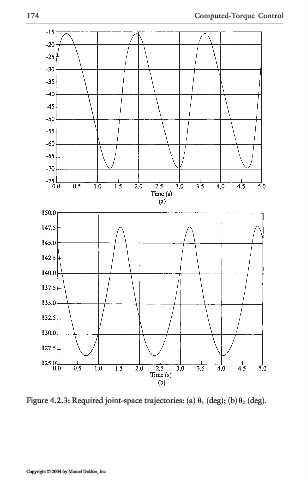
Figure 4.2.3: Required joint-space trajectories: (a) 1 (deg); (b) 2 (deg).
Copyright © 2004 by Marcel Dekker, Inc.