
Page 115 - Robot Builders Source Book - Gordon McComb
P. 115
104 Dynamic Analysis of Drives
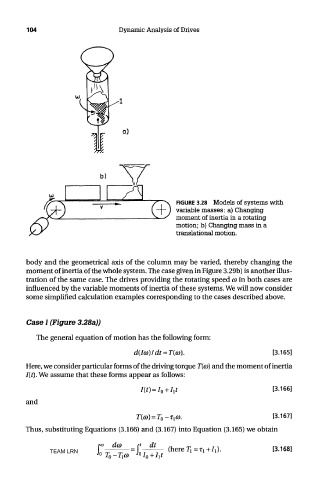
FIGURE 3.28 Models of systems with
variable masses: a) Changing
moment of inertia in a rotating
motion; b) Changing mass in a
translational motion.
body and the geometrical axis of the column may be varied, thereby changing the
moment of inertia of the whole system. The case given in Figure 3.29b) is another illus-
tration of the same case. The drives providing the rotating speed a> in both cases are
influenced by the variable moments of inertia of these systems. We will now consider
some simplified calculation examples corresponding to the cases described above.
Case 1 (Figure 3.28a))
The general equation of motion has the following form:
Here, we consider particular forms of the driving torque T(co) and the moment of inertia
/(£). We assume that these forms appear as follows:
and
Thus, substituting Equations (3.166) and (3.167) into Equation (3.165) we obtain
TEAM LRN