
Page 206 - Robot Builders Source Book - Gordon McComb
P. 206
194 Feedback Sensors
FIGURE 5.28 Piezoelectric acceleration sensor.
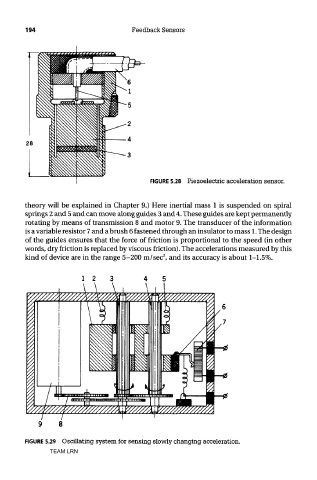
theory will be explained in Chapter 9.) Here inertial mass 1 is suspended on spiral
springs 2 and 5 and can move along guides 3 and 4. These guides are kept permanently
rotating by means of transmission 8 and motor 9. The transducer of the information
is a variable resistor 7 and a brush 6 fastened through an insulator to mass 1. The design
of the guides ensures that the force of friction is proportional to the speed (in other
words, dry friction is replaced by viscous friction). The accelerations measured by this
2
kind of device are in the range 5-200 m/sec , and its accuracy is about 1-1.5%.
FIGURE 5.29 Oscillating system for sensing slowly changing acceleration.
TEAM LRN