
Page 24 - Robotics Designing the Mechanisms for Automated Machinery
P. 24
1.3 Manipulators 13
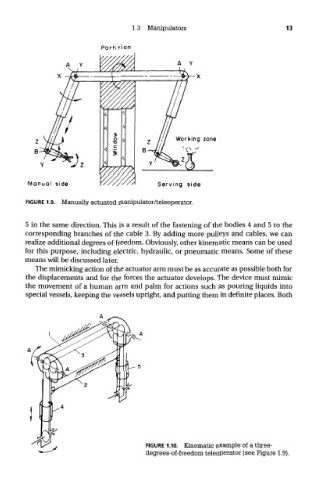
FIGURE 1.9. Manually actuated manipulator/teleoperator.
5 in the same direction. This is a result of the fastening of the bodies 4 and 5 to the
corresponding branches of the cable 3. By adding more pulleys and cables, we can
realize additional degrees of freedom. Obviously, other kinematic means can be used
for this purpose, including electric, hydraulic, or pneumatic means. Some of these
means will be discussed later.
The mimicking action of the actuator arm must be as accurate as possible both for
the displacements and for the forces the actuator develops. The device must mimic
the movement of a human arm and palm for actions such as pouring liquids into
special vessels, keeping the vessels upright, and putting them in definite places. Both
FIGURE 1.10. Kinematic example of a three-
degrees-of-freedom teleoperator (see Figure 1.9).