
Page 27 - Robotics Designing the Mechanisms for Automated Machinery
P. 27
16 Introduction: Brief Historical Review and Main Definitions
FIGURE 1.13 Layout of a Cartesian
manipulator.
activated devices described previously; namely, the control of the movements must be
organized artificially, and what would be a natural action for a manually operated
device becomes a complicated technical problem in a nonmanual manipulator. Thus,
the sequence, speed, and directions of the movements of the links must be found. For
example, it takes a person one or two seconds to light a match, but it takes a manip-
ulator about 30 seconds to carry out the same action.
Another difficulty is that the mechanical manipulator is usually not able to feel
resistance while handling different objects. This is one of the most important prob-
lems being tackled in the development of modern robotics. Sensitive elements able to
gauge the forces, texture, or response of objects to be handled have still to be created
for industrial purposes.
Certain success has been achieved in the development of manipulators acting in
concert with means for artificial vision. The task of the artificial-vision manipulator is
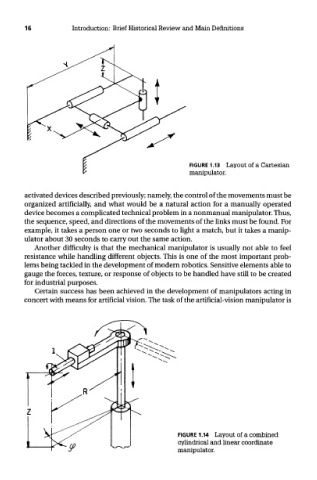
FIGURE 1.14 Layout of a combined
cylindrical and linear coordinate
manipulator.