
Page 29 - Robotics Designing the Mechanisms for Automated Machinery
P. 29
18 Introduction: Brief Historical Review and Main Definitions
• The mechanical system becomes more flexible or less stiff, and
• The dynamic behavior, the accuracy, the repeatability, and the speed of response
of the system deteriorate.
The answer to that question leads us to the next question: to obtain, say, eight
degrees of freedom, should one use two manipulators with four degrees of freedom or
even four manipulators with two degrees of freedom? The facts show that in certain
situations it is indeed preferable to use a team of low-degrees-of-freedom manipula-
tors rather than one sophisticated multi-degrees-of-freedom system.
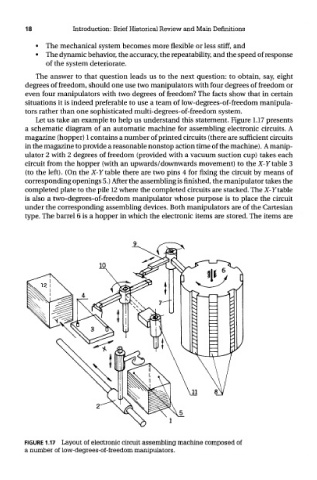
Let us take an example to help us understand this statement. Figure 1.17 presents
a schematic diagram of an automatic machine for assembling electronic circuits. A
magazine (hopper) 1 contains a number of printed circuits (there are sufficient circuits
in the magazine to provide a reasonable nonstop action time of the machine). A manip-
ulator 2 with 2 degrees of freedom (provided with a vacuum suction cup) takes each
circuit from the hopper (with an upwards/downwards movement) to the X-Y table 3
(to the left). (On the X-Y table there are two pins 4 for fixing the circuit by means of
corresponding openings 5.) After the assembling is finished, the manipulator takes the
completed plate to the pile 12 where the completed circuits are stacked. The X-7 table
is also a two-degrees-of-freedom manipulator whose purpose is to place the circuit
under the corresponding assembling devices. Both manipulators are of the Cartesian
type. The barrel 6 is a hopper in which the electronic items are stored. The items are
FIGURE 1.17 Layout of electronic circuit assembling machine composed of
a number of low-degrees-of-freedom manipulators.