
Page 222 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 222
PLANAR REVOLUTE–REVOLUTE (RR) ARM 197
b 7
b 6
a 10
a 1
a 2 a 9
a 3
a 4 − a 8
b 5
b 1 b 2
b 10 A
b 8
b 3
b 11
b 9
0 b 4
(a) a 11
11
10
9 1
7
2
8
A 3
4 6
5
(b)
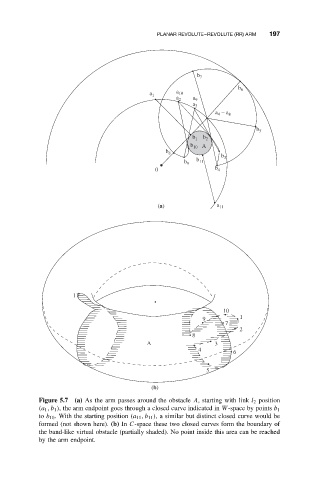
Figure 5.7 (a) As the arm passes around the obstacle A, starting with link l 2 position
(a 1 ,b 1 ), the arm endpoint goes through a closed curve indicated in W-space by points b 1
to b 10 . With the starting position (a 11 ,b 11 ), a similar but distinct closed curve would be
formed (not shown here). (b) In C-space these two closed curves form the boundary of
the band-like virtual obstacle (partially shaded). No point inside this area can be reached
by the arm endpoint.