
Page 63 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 63
38 A QUICK SKETCH OF MAJOR ISSUES IN ROBOTICS
• Open-loop control, where the control action is applied regardless the system
errors
• Linear control, in which the control law is a linear relationship
• Nonlinear control, in which the control law is a nonlinear relationship
Because there are a great number of nonlinear relationships, the term “nonlinear
control” calls for further precision. Typically, the nonlinear control is more com-
plex to realize than linear control, so a need for nonlinear control suggests that the
system in question is quite complex. One finds in literature many terms related
to different methods of nonlinear control: switching controls (which are further
divided into a bang-bang control, duty-cycle modulation, logic control), globally
nonlinear feedback mapping (e.g., saturating controls), adaptive control (with its
own division into, for example, model-based reference control and self-tuning
control), and so on. Both linear and nonlinear control are typically realized as
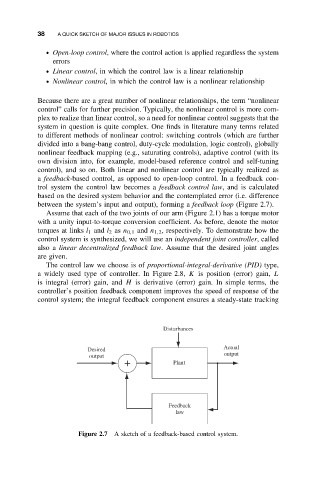
a feedback-based control, as opposed to open-loop control. In a feedback con-
trol system the control law becomes a feedback control law, and is calculated
based on the desired system behavior and the contemplated error (i.e. difference
between the system’s input and output), forming a feedback loop (Figure 2.7).
Assume that each of the two joints of our arm (Figure 2.1) has a torque motor
with a unity input-to-torque conversion coefficient. As before, denote the motor
torques at links l 1 and l 2 as n 0,1 and n 1,2 , respectively. To demonstrate how the
control system is synthesized, we will use an independent joint controller, called
also a linear decentralized feedback law. Assume that the desired joint angles
are given.
The control law we choose is of proportional-integral-derivative (PID) type,
a widely used type of controller. In Figure 2.8, K is position (error) gain, L
is integral (error) gain, and H is derivative (error) gain. In simple terms, the
controller’s position feedback component improves the speed of response of the
control system; the integral feedback component ensures a steady-state tracking
Disturbances
Actual
Desired
output
output
Plant
Feedback
law
Figure 2.7 A sketch of a feedback-based control system.