
Page 68 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 68
COMPLIANT MOTION 43
x
y
− x e M x e
x d + y e 1 1 0 0 Position
y d Σ 0 0 controller
Σ
f ex M 0 Robot
f dx f ey 2 0 0 f ey Force
f dy + Σ 0 1 controller
−
f x
f y
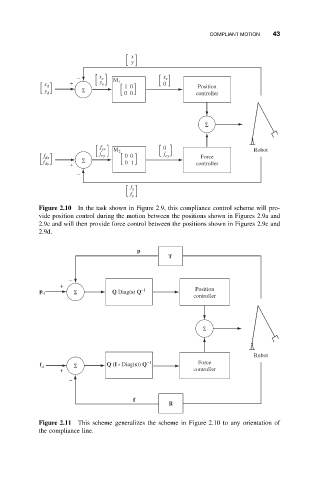
Figure 2.10 In the task shown in Figure 2.9, this compliance control scheme will pro-
vide position control during the motion between the positions shown in Figures 2.9a and
2.9c and will then provide force control between the positions shown in Figures 2.9c and
2.9d.
p
T
−
+
p d Σ Q Diag(s) Q −1 Position
controller
Σ
Robot
f d Σ Q (I - Diag(s)) Q −1 Force
+ controller
−
f
R
Figure 2.11 This scheme generalizes the scheme in Figure 2.10 to any orientation of
the compliance line.