
Page 453 - Sensors and Control Systems in Manufacturing
P. 453
Sensors in Flexible Manufacturing Systems
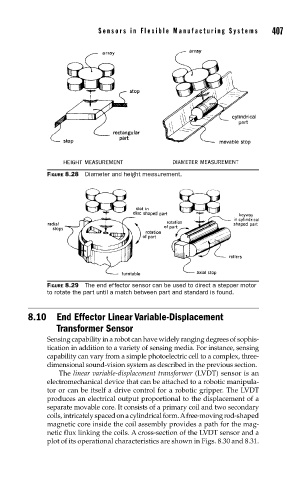
FIGURE 8.28 Diameter and height measurement. 407
FIGURE 8.29 The end effector sensor can be used to direct a stepper motor
to rotate the part until a match between part and standard is found.
8.10 End Effector Linear Variable-Displacement
Transformer Sensor
Sensing capability in a robot can have widely ranging degrees of sophis-
tication in addition to a variety of sensing media. For instance, sensing
capability can vary from a simple photoelectric cell to a complex, three-
dimensional sound-vision system as described in the previous section.
The linear variable-displacement transformer (LVDT) sensor is an
electromechanical device that can be attached to a robotic manipula-
tor or can be itself a drive control for a robotic gripper. The LVDT
produces an electrical output proportional to the displacement of a
separate movable core. It consists of a primary coil and two secondary
coils, intricately spaced on a cylindrical form. A free-moving rod-shaped
magnetic core inside the coil assembly provides a path for the mag-
netic flux linking the coils. A cross-section of the LVDT sensor and a
plot of its operational characteristics are shown in Figs. 8.30 and 8.31.