
Page 588 - The Mechatronics Handbook
P. 588
0066_Frame_C20 Page 58 Friday, January 18, 2002 5:27 PM
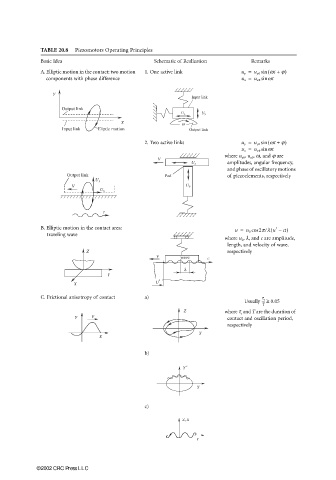
TABLE 20.8 Piezomotors Operating Principles
Basic Idea Schematic of Realization Remarks
A. Elliptic motion in the contact: two motion 1. One active link u y = u y0 sin ( ωt + ϕ)
components with phase difference u x = u x0 sin ωt
Y
Input link
Output link
U x U y
X w
Input link Eliptic motion Output link
2. Two active links u y = u y0 sin ( ωt + ϕ)
u x = u x0 sin ωt
where u y0 , u x0 , ω, and ϕ are
V
U x amplitudes, angular frequency,
and phase of oscillatory motions
Output link Pad of piezoelements, respectively
U y
V U y
U x
c
B. Elliptic motion in the contact area: ∗
(
u = u 0 cos 2π/λ u – ct)
traveling wave
where u 0 , λ, and c are amplitude,
length, and velocity of wave,
Z respectively
V wave c
l
Y
*
X U
C. Frictional anisotropy of contact a)
Usually --- ≥ 0.05
τ c
T
Z where τ c and T are the duration of
contact and oscillation period,
respectively
Y
b)
Y′
Y
c)
Z, X
Y
©2002 CRC Press LLC