
Page 667 - The Mechatronics Handbook
P. 667
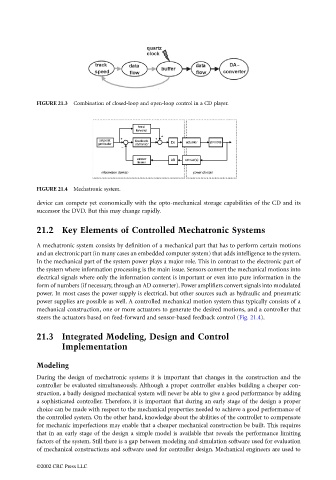
FIGURE 21.3 Combination of closed-loop and open-loop control in a CD player.
FIGURE 21.4 Mechatronic system.
device can compete yet economically with the opto-mechanical storage capabilities of the CD and its
successor the DVD. But this may change rapidly.
21.2 Key Elements of Controlled Mechatronic Systems
A mechatronic system consists by definition of a mechanical part that has to perform certain motions
and an electronic part (in many cases an embedded computer system) that adds intelligence to the system.
In the mechanical part of the system power plays a major role. This in contrast to the electronic part of
the system where information processing is the main issue. Sensors convert the mechanical motions into
electrical signals where only the information content is important or even into pure information in the
form of numbers (if necessary, through an AD converter). Power amplifiers convert signals into modulated
power. In most cases the power supply is electrical, but other sources such as hydraulic and pneumatic
power supplies are possible as well. A controlled mechanical motion system thus typically consists of a
mechanical construction, one or more actuators to generate the desired motions, and a controller that
steers the actuators based on feed-forward and sensor-based feedback control (Fig. 21.4).
21.3 Integrated Modeling, Design and Control
Implementation
Modeling
During the design of mechatronic systems it is important that changes in the construction and the
controller be evaluated simultaneously. Although a proper controller enables building a cheaper con-
struction, a badly designed mechanical system will never be able to give a good performance by adding
a sophisticated controller. Therefore, it is important that during an early stage of the design a proper
choice can be made with respect to the mechanical properties needed to achieve a good performance of
the controlled system. On the other hand, knowledge about the abilities of the controller to compensate
for mechanic imperfections may enable that a cheaper mechanical construction be built. This requires
that in an early stage of the design a simple model is available that reveals the performance limiting
factors of the system. Still there is a gap between modeling and simulation software used for evaluation
of mechanical constructions and software used for controller design. Mechanical engineers are used to
©2002 CRC Press LLC