
Page 980 - The Mechatronics Handbook
P. 980
x
FIGURE 33.4 Closed loop-position control with indirect measurement.
Other Users Servovalve (Servo) Cylinder
Q M2A
p = konst. p M2A
P A
T B
Q M2B
p M2B
Accumulator
y, v, a
F L
High Pressure Filter Q M1A
Q p M1A
P
ϕ, ω, α
ω P
ε U
- U actual
Σ M L
Q M1B
U prescribed p M1B
Tank
Return Line Filter Tacho Generator Tank
Electro Motor Pressure Reduction Valve Servovalve (Servo) Rotary Motor Load
Variable Displacement Pump
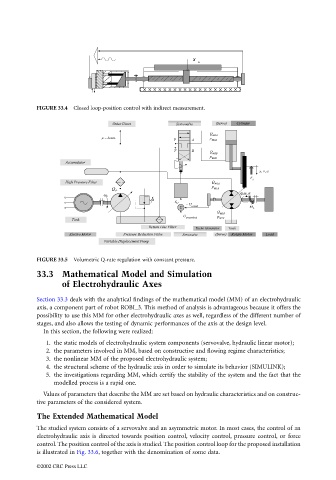
FIGURE 33.5 Volumetric Q-rate regulation with constant pressure.
33.3 Mathematical Model and Simulation
of Electrohydraulic Axes
Section 33.3 deals with the analytical findings of the mathematical model (MM) of an electrohydraulic
axis, a component part of robot ROBI_3. This method of analysis is advantageous because it offers the
possibility to use this MM for other electrohydraulic axes as well, regardless of the different number of
stages, and also allows the testing of dynamic performances of the axis at the design level.
In this section, the following were realized:
1. the static models of electrohydraulic system components (servovalve, hydraulic linear motor);
2. the parameters involved in MM, based on constructive and flowing regime characteristics;
3. the nonlinear MM of the proposed electrohydraulic system;
4. the structural scheme of the hydraulic axis in order to simulate its behavior (SIMULINK);
5. the investigations regarding MM, which certify the stability of the system and the fact that the
modelled process is a rapid one.
Values of parameters that describe the MM are set based on hydraulic characteristics and on construc-
tive parameters of the considered system.
The Extended Mathematical Model
The studied system consists of a servovalve and an asymmetric motor. In most cases, the control of an
electrohydraulic axis is directed towards position control, velocity control, pressure control, or force
control. The position control of the axis is studied. The position control loop for the proposed installation
is illustrated in Fig. 33.6, together with the denomination of some data.
©2002 CRC Press LLC