
Page 491 - Thomson, William Tyrrell-Theory of Vibration with Applications-Taylor _ Francis (2010)
P. 491
478 Nonlinear Vibrations Chap. 14
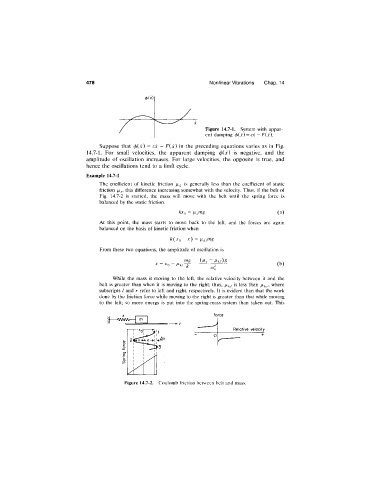
Figure 14.7-1. System with appar
ent damping = cx - F(x).
Suppose that (¡){x) = cx - F{x) in the preceding equations varies as in Fig.
14.7-1. For small velocities, the apparent damping (f)(x) is negative, and the
amplitude of oscillation increases. For large velocities, the opposite is true, and
hence the oscillations tend to a limit cycle.
Example 14.7-1
The coefficient of kinetic friction is generally less than the coefficient of static
friction this difference increasing somewhat with the velocity. Thus, if the belt of
Fig. 14.7-2 is started, the mass will move with the belt until the spring force is
balanced by the static friction.
Æxo = fi^mg (a)
At this point, the mass starts to move back to the left, and the forces are again
balanced on the basis of kinetic friction when
k(Xt,-x)= fXi^itrig
From these two equations, the amplitude of oscillation is
mg (Ms -
^ ~ ^{) Fki ^ (b)
While the mass is moving to the left, the relative velocity between it and the
belt is greater than when it is moving to the right; thus, is less than where
subscripts / and r refer to left and right, respectively. It is evident then that the work
done by the friction force while moving to the right is greater than that while moving
to the left; so more energy is put into the spring-mass system than taken out. This
force
^--- VW\A—
Relative velocity
Figure 14.7-2. Coulomb friction between belt and mass.