
Page 186 - Welding Robots Technology, System Issues, and Applications
P. 186
174 Welding Robots
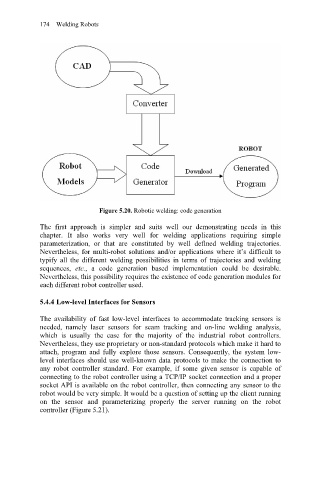
Figure 5.20. Robotic welding: code generation
The first approach is simpler and suits well our demonstrating needs in this
chapter. It also works very well for welding applications requiring simple
parameterization, or that are constituted by well defined welding trajectories.
Nevertheless, for multi-robot solutions and/or applications where it’s difficult to
typify all the different welding possibilities in terms of trajectories and welding
sequences, etc., a code generation based implementation could be desirable.
Nevertheless, this possibility requires the existence of code generation modules for
each different robot controller used.
5.4.4 Low-level Interfaces for Sensors
The availability of fast low-level interfaces to accommodate tracking sensors is
needed, namely laser sensors for seam tracking and on-line welding analysis,
which is usually the case for the majority of the industrial robot controllers.
Nevertheless, they use proprietary or non-standard protocols which make it hard to
attach, program and fully explore those sensors. Consequently, the system low-
level interfaces should use well-known data protocols to make the connection to
any robot controller standard. For example, if some given sensor is capable of
connecting to the robot controller using a TCP/IP socket connection and a proper
socket API is available on the robot controller, then connecting any sensor to the
robot would be very simple. It would be a question of setting up the client running
on the sensor and parameterizing properly the server running on the robot
controller (Figure 5.21).