
Page 187 - Welding Robots Technology, System Issues, and Applications
P. 187
Robotic Welding: Application Examples 175
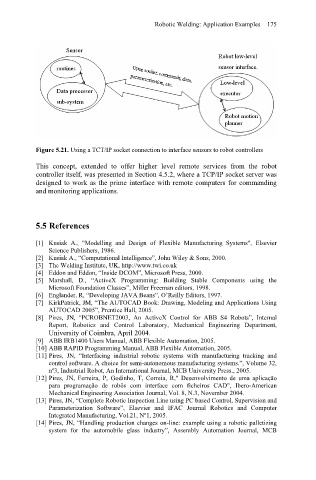
Figure 5.21. Using a TCT/IP socket connection to interface sensors to robot controllers
This concept, extended to offer higher level remote services from the robot
controller itself, was presented in Section 4.5.2, where a TCP/IP socket server was
designed to work as the prime interface with remote computers for commanding
and monitoring applications.
5.5 References
[1] Kusiak A., "Modelling and Design of Flexible Manufacturing Systems", Elsevier
Science Publishers, 1986.
[2] Kusiak A., “Computational Intelligence”, John Wiley & Sons, 2000.
[3] The Welding Institute, UK, http://www.twi.co.uk
[4] Eddon and Eddon, “Inside DCOM”, Microsoft Press, 2000.
[5] Marshall, D., “ActiveX Programming: Building Stable Components using the
Microsoft Foundation Classes”, Miller Freeman editors, 1998.
[6] Englander, R, “Developing JAVA Beans”, O’Reilly Editors, 1997.
[7] KirkPatrick, JM, “The AUTOCAD Book: Drawing, Modeling and Applications Using
AUTOCAD 2005”, Prentice Hall, 2005.
[8] Pires, JN, “PCROBNET2003, An ActiveX Control for ABB S4 Robots”, Internal
Report, Robotics and Control Laboratory, Mechanical Engineering Department,
University of Coimbra, April 2004.
[9] ABB IRB1400 Users Manual, ABB Flexible Automation, 2005.
[10] ABB RAPID Programming Manual, ABB Flexible Automation, 2005.
[11] Pires, JN, “Interfacing industrial robotic systems with manufacturing tracking and
control software. A choice for semi-autonomous manufacturing systems.”, Volume 32,
nº3, Industrial Robot, An International Journal, MCB University Press., 2005.
[12] Pires, JN, Ferreira, P, Godinho, T, Correia, R," Desenvolvimento de uma aplicação
para programação de robôs com interface com ficheiros CAD", Ibero-American
Mechanical Engineering Association Journal, Vol. 8, N.3, November 2004.
[13] Pires, JN, “Complete Robotic Inspection Line using PC based Control, Supervision and
Parameterization Software”, Elsevier and IFAC Journal Robotics and Computer
Integrated Manufacturing, Vol.21, Nº1, 2005.
[14] Pires, JN, “Handling production changes on-line: example using a robotic palletizing
system for the automobile glass industry”, Assembly Automation Journal, MCB