
Page 43 - Welding Robots Technology, System Issues, and Applications
P. 43
Welding Robots
28
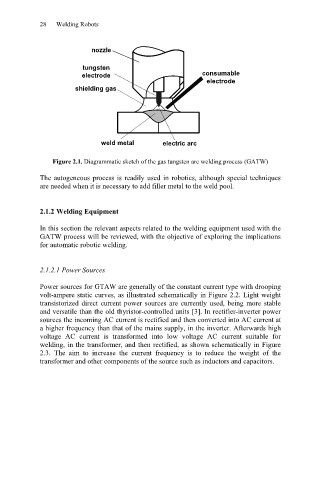
nozzle
tungsten
electrode consumable
electrode
shielding gas
weld metal electric arc
Figure 2.1. Diagrammatic sketch of the gas tungsten arc welding process (GATW)
The autogeneous process is readily used in robotics, although special techniques
are needed when it is necessary to add filler metal to the weld pool.
2.1.2 Welding Equipment
In this section the relevant aspects related to the welding equipment used with the
GATW process will be reviewed, with the objective of exploring the implications
for automatic robotic welding.
2.1.2.1 Power Sources
Power sources for GTAW are generally of the constant current type with drooping
volt-ampere static curves, as illustrated schematically in Figure 2.2. Light weight
transistorized direct current power sources are currently used, being more stable
and versatile than the old thyristor-controlled units [3]. In rectifier-inverter power
sources the incoming AC current is rectified and then converted into AC current at
a higher frequency than that of the mains supply, in the inverter. Afterwards high
voltage AC current is transformed into low voltage AC current suitable for
welding, in the transformer, and then rectified, as shown schematically in Figure
2.3. The aim to increase the current frequency is to reduce the weight of the
transformer and other components of the source such as inductors and capacitors.