
Page 47 - Welding Robots Technology, System Issues, and Applications
P. 47
Welding Robots
32
Reverse polarity may be of interest in welding aluminum alloys because of the
cathodic cleaning action of negative pole in the work-piece, that is the removal of
the refractory aluminum oxide layer. However alternating current is better adapted
to welding of aluminum and magnesium alloys, because it allows balancing
electrode heating and work-piece cleaning effects. Weld penetration depth obtained
with AC is between depth obtained with DCEN and DCEP, as illustrated in Figure
2.5.
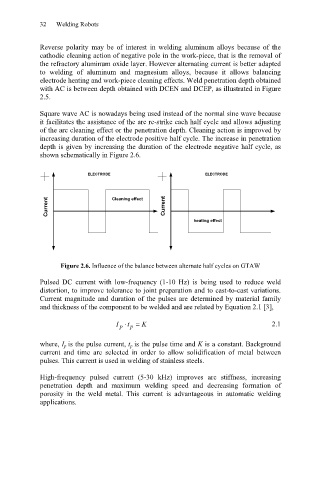
Square wave AC is nowadays being used instead of the normal sine wave because
it facilitates the assistance of the arc re-strike each half cycle and allows adjusting
of the arc cleaning effect or the penetration depth. Cleaning action is improved by
increasing duration of the electrode positive half cycle. The increase in penetration
depth is given by increasing the duration of the electrode negative half cycle, as
shown schematically in Figure 2.6.
ELECTRODE ELECTRODE
Current Cleaning effect Current
heating effect
Figure 2.6. Influence of the balance between alternate half cycles on GTAW
Pulsed DC current with low-frequency (1-10 Hz) is being used to reduce weld
distortion, to improve tolerance to joint preparation and to cast-to-cast variations.
Current magnitude and duration of the pulses are determined by material family
and thickness of the component to be welded and are related by Equation 2.1 [3],
I t K 2.1
p
p
where, I p is the pulse current, t p is the pulse time and K is a constant. Background
current and time are selected in order to allow solidification of metal between
pulses. This current is used in welding of stainless steels.
High-frequency pulsed current (5-30 kHz) improves arc stiffness, increasing
penetration depth and maximum welding speed and decreasing formation of
porosity in the weld metal. This current is advantageous in automatic welding
applications.