
Page 188 - Adaptive Identification and Control of Uncertain Systems with Nonsmooth Dynamics
P. 188
Adaptive Dynamic Surface Output Feedback Control of Pure-Feedback Systems 185
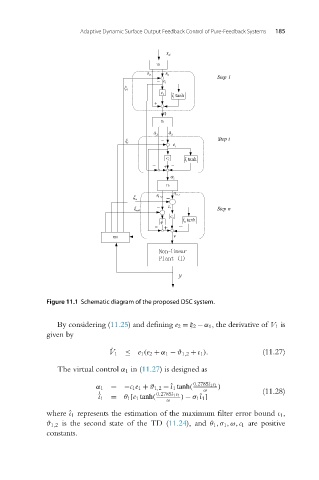
Figure 11.1 Schematic diagram of the proposed DSC system.
By considering (11.25)and defining e 2 = ξ 2 − α 1, the derivative of V 1 is
given by
˙ V 1 ≤ e 1 (e 2 + α 1 − ϑ 1,2 + ι 1 ). (11.27)
The virtual control α 1 in (11.27)isdesignedas
ι
ι
α 1 =−c 1e 1 + ϑ 1,2 − 1 tanh( 0.2785ˆ 1 e 1 )
ω (11.28)
ι
˙ = θ 1 [e 1 tanh( 0.2785ˆ 1 e 1 ι
ˆ ι 1 ) − σ 1 ˆ 1 ]
ω
where ˆι 1 represents the estimation of the maximum filter error bound ι 1,
ϑ 1,2 is the second state of the TD (11.24), and θ 1 ,σ 1 ,ω,c 1 are positive
constants.