
Page 288 - Adaptive Identification and Control of Uncertain Systems with Nonsmooth Dynamics
P. 288
290 Adaptive Identification and Control of Uncertain Systems with Non-smooth Dynamics
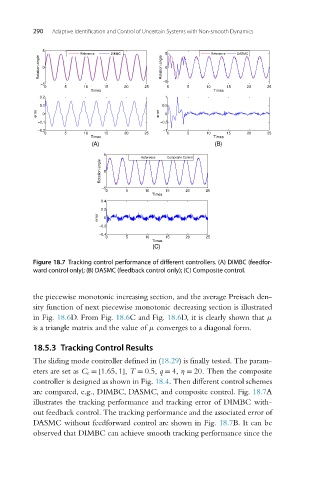
Figure 18.7 Tracking control performance of different controllers. (A) DIMBC (feedfor-
ward control only); (B) DASMC (feedback control only); (C) Composite control.
the piecewise monotonic increasing section, and the average Preisach den-
sity function of next piecewise monotonic decreasing section is illustrated
in Fig. 18.6D. From Fig. 18.6Cand Fig. 18.6D, it is clearly shown that μ
is a triangle matrix and the value of μ converges to a diagonal form.
18.5.3 Tracking Control Results
The sliding mode controller defined in (18.29) is finally tested. The param-
eters are set as C e =[1.65,1], T = 0.5, q = 4, η = 20. Then the composite
controller is designed as shown in Fig. 18.4. Then different control schemes
are compared, e.g., DIMBC, DASMC, and composite control. Fig. 18.7A
illustrates the tracking performance and tracking error of DIMBC with-
out feedback control. The tracking performance and the associated error of
DASMC without feedforward control are shown in Fig. 18.7B. It can be
observed that DIMBC can achieve smooth tracking performance since the