
Page 78 - Adaptive Identification and Control of Uncertain Systems with Nonsmooth Dynamics
P. 78
APPC of Servo Systems With Continuously Differentiable Friction Model 69
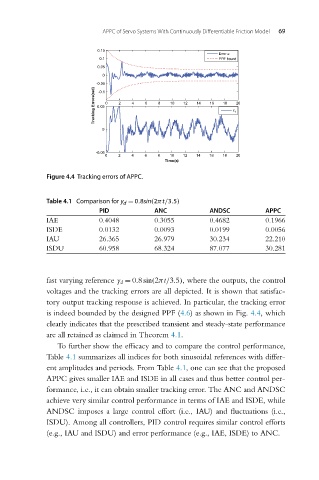
Figure 4.4 Tracking errors of APPC.
Table 4.1 Comparison for y = 0.8sin(2πt/3.5)
d
PID ANC ANDSC APPC
IAE 0.4048 0.3055 0.4682 0.1966
ISDE 0.0132 0.0093 0.0199 0.0056
IAU 26.365 26.979 30.234 22.210
ISDU 60.958 68.324 87.077 30.281
fast varying reference y d = 0.8sin(2πt/3.5), where the outputs, the control
voltages and the tracking errors are all depicted. It is shown that satisfac-
tory output tracking response is achieved. In particular, the tracking error
is indeed bounded by the designed PPF (4.6)asshown inFig. 4.4,which
clearly indicates that the prescribed transient and steady-state performance
are all retained as claimed in Theorem 4.1.
To further show the efficacy and to compare the control performance,
Table 4.1 summarizes all indices for both sinusoidal references with differ-
ent amplitudes and periods. From Table 4.1, one can see that the proposed
APPC gives smaller IAE and ISDE in all cases and thus better control per-
formance, i.e., it can obtain smaller tracking error. The ANC and ANDSC
achieve very similar control performance in terms of IAE and ISDE, while
ANDSC imposes a large control effort (i.e., IAU) and fluctuations (i.e.,
ISDU). Among all controllers, PID control requires similar control efforts
(e.g., IAU and ISDU) and error performance (e.g., IAE, ISDE) to ANC.