
Page 148 - Advances in Renewable Energies and Power Technologies
P. 148
1. Introduction 121
1.8 HILL CLIMBING TECHNIQUE
The advantage of the hill climbing (HC) MPPT technique is its simplicity [38,39].It
uses the duty cycle of boost converter as the judging parameter when the task of the
MPPT is implemented. When the condition dP/dD ¼ 0 is accomplished, it repre-
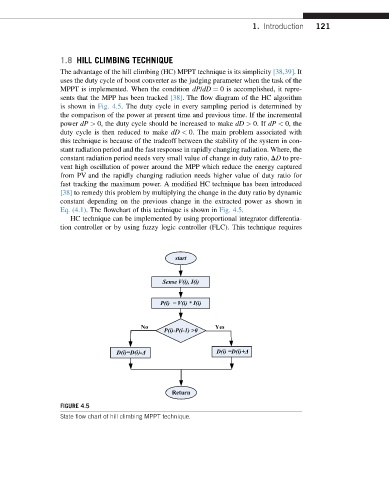
sents that the MPP has been tracked [38]. The flow diagram of the HC algorithm
is shown in Fig. 4.5. The duty cycle in every sampling period is determined by
the comparison of the power at present time and previous time. If the incremental
power dP > 0, the duty cycle should be increased to make dD > 0. If dP < 0, the
duty cycle is then reduced to make dD < 0. The main problem associated with
this technique is because of the tradeoff between the stability of the system in con-
stant radiation period and the fast response in rapidly changing radiation. Where, the
constant radiation period needs very small value of change in duty ratio, DD to pre-
vent high oscillation of power around the MPP which reduce the energy captured
from PV and the rapidly changing radiation needs higher value of duty ratio for
fast tracking the maximum power. A modified HC technique has been introduced
[38] to remedy this problem by multiplying the change in the duty ratio by dynamic
constant depending on the previous change in the extracted power as shown in
Eq. (4.1). The flowchart of this technique is shown in Fig. 4.5.
HC technique can be implemented by using proportional integrator differentia-
tion controller or by using fuzzy logic controller (FLC). This technique requires
start
Sense V(i), I(i)
P(i) = V(i) * I(i)
No Yes
P(i)-P(i-1) >0
D(i)=D(i)-Δ D(i) =D(i)+Δ
Return
FIGURE 4.5
State flow chart of hill climbing MPPT technique.