
Page 241 - Automotive Engineering Powertrain Chassis System and Vehicle Body
P. 241
Types of suspension and drive CHAPTER 8.1
According to EU Directive 70/156/EWG, a ‘towed
trailer load’ of 1.5 times the permissible total weight has
been possible for multi-purpose passenger vehicles (four-
wheel passenger vehicles) since 1994.
However, the system-dependent, obvious disadvan-
tages given below should not be ignored:
acquisition costs;
around 6–10% higher kerb weight of the vehicle;
generally somewhat lower maximum speed;
5–10% increased fuel consumption;
in some systems, limited or no opportunity for using
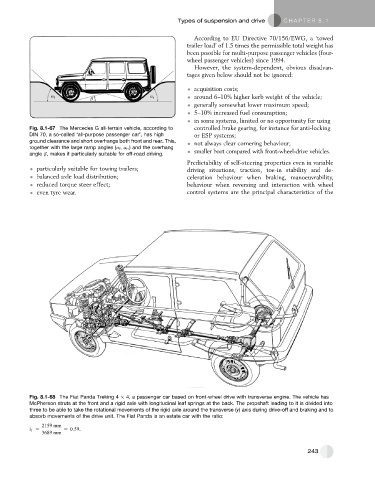
Fig. 8.1-67 The Mercedes G all-terrain vehicle, according to controlled brake gearing, for instance for anti-locking
DIN 70, a so-called ‘all-purpose passenger car’, has high or ESP systems;
ground clearance and short overhangs both front and rear. This, not always clear cornering behaviour;
together with the large ramp angles (a f , a r ,) and the overhang
angle b, makes it particularly suitable for off-road driving. smaller boot compared with front-wheel-drive vehicles.
Predictability of self-steering properties even in variable
particularly suitable for towing trailers; driving situations, traction, toe-in stability and de-
balanced axle load distribution; celeration behaviour when braking, manoeuvrability,
reduced torque steer effect; behaviour when reversing and interaction with wheel
even tyre wear. control systems are the principal characteristics of the
Fig. 8.1-68 The Fiat Panda Treking 4 4, a passenger car based on front-wheel drive with transverse engine. The vehicle has
McPherson struts at the front and a rigid axle with longitudinal leaf springs at the back. The propshaft leading to it is divided into
three to be able to take the rotational movements of the rigid axle around the transverse (y) axis during drive-off and braking and to
absorb movements of the drive unit. The Fiat Panda is an estate car with the ratio:
2159 mm
i 1 ¼ ¼ 0:59.
3689 mm
243