
Page 461 - Automotive Engineering Powertrain Chassis System and Vehicle Body
P. 461
CHAP TER 1 4. 2 Decisional architecture
Considering k as a configuration parameter ensures that Reachable configuration space for the CC car The
it will vary continuously. small-time controllability of the CC car has been estab-
A is subject to the perfect rolling constraint (Equation lished in Scheuer and Laugier (1998, Theorem 1). Ac-
14.2.36) and the bounded curvature constraint (Equa- cordingly, the existence of an admissible collision-free
tion 14.2.37). Let s denote the derivative of: path is equivalent to the existence of a collision-free
2
k : s ¼ f=cos f. The steering velocity of A is physically path. Furthermore, if a path exists between two config-
_
limited, jfj f _ max , and the following constraint is added urations then an optimal path exists as well (Scheuer and
(bounded curvature derivative constraint): Laugier, 1998, Theorem 2).
Optimal paths for the CC car The nature of the op-
jsj s max ¼ f _ max (14.2.41) timal paths for the CC car is more difficult to establish
than for the RS car. However Scheuer (1998) demon-
Accordingly the model of A can now be described by
the following differential system: strates that, for the forward CC car, i.e. the CC car
0 1 0 1 0 1 moving forward only, the optimal paths are made up of:
_ x cosq 0 (a) line segments, (b) circular arcs of radius 1=k max , and
B C B sinq C B C (c) clothoid arcs 12 of sharpness s max . Unfortunately, it
0
_ y
B C ¼ B C v þ B C s (14.2.42)
@ _ A @ k A @ A appears that, whenever the shortest path includes a line
0
q
_ k 0 1 segment, it is irregular and contains an infinite number of
clothoid arcs that accumulate towards each endpoint of
with jkj k max ; jvj¼ 1 and jsj s max . The system the segment (Boissonnat et al., 1994). Furthermore,
(Equation 14.2.42) under the different control con- when the distance between two configurations is large
straints defines the Continuous-curvature car. enough, the shortest path contains a line segment hence
Admissible paths for the CC car The configuration an infinite number of clothoid arcs (Degtiariova-Kostova
2
space of A is now 4-dimensional: ChR j0:2pj R. and Kostov, 1998).
A path for A is a continuous sequence of configurations: In summary, although the exact nature of the optimal
PðtÞ¼ðxðtÞ; yðtÞ; qðtÞ; kðtÞÞ. An admissible path must paths for the CC car has not been established yet, it
satisfy the constraints (Equations 14.2.36, 14.2.37, seems reasonable to conjecture that they will (at least) be
14.2.41); it is a solution of the differential system made up of line segments, circular arcs and clothoid arcs,
(Equation 14.2.42); it is such that: and that they will be irregular in most cases.
8 Ð t Collision-free path planning for the CC car The main
> xðtÞ¼ xð0Þþ Ð 0 vðsÞcosqðsÞds path planning techniques presented earlier are generic:
>
>
<
yðtÞ¼ xð0Þþ t vðsÞsinqðsÞds they can be used for a wide variety of robotics systems.
Ð 0 t (14.2.43)
> qðtÞ¼ qð0Þþ Ð 0 vðsÞkðsÞds To some extent, they mainly rely upon the existence of
>
>
:
kðtÞ¼ kð0Þþ 0 t sðsÞs a steering method for the robotics system considered.
As for the CC car and to the best of the authors’
with jkðsÞj k max ; jvðsÞj ¼ 1 and jsðsÞj s max : knowledge, there is only one steering method that has been
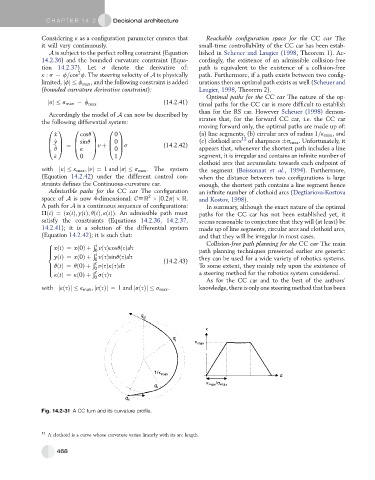
Fig. 14.2-31 A CC turn and its curvature profile.
12
A clothoid is a curve whose curvature varies linearly with its arc length.
468