
Page 462 - Automotive Engineering Powertrain Chassis System and Vehicle Body
P. 462
Decisional architecture C HAPTER 14.2
Table 14.2-1 RS vs. CC paths’ length
Min. Average Max. Deviation
Ratio 1.00253 1.1065 2.45586 0.172188
Table 14.2-2 RS vs. CC paths’ computation time
RS (1000 paths) CC (1000 paths) Average ratio
3.466586 s. 4.483492 s. 1.33
14.2.5.6.3 Reeds and shepp car versus the
continuous-curvature car
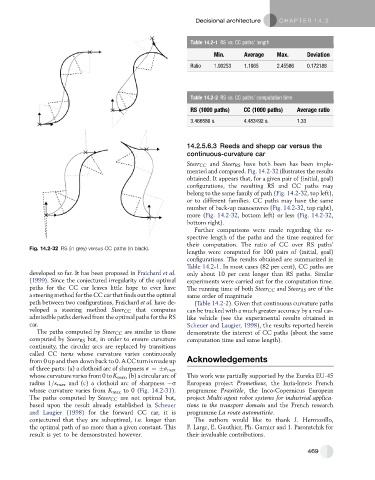
Steer CC and Steer RS have both been has been imple-
mented and compared. Fig. 14.2-32 illustrates the results
obtained. It appears that, for a given pair of (initial, goal)
configurations, the resulting RS and CC paths may
belong to the same family of path (Fig. 14.2-32, top left),
or to different families. CC paths may have the same
number of back-up manoeuvres (Fig. 14.2-32, top right),
more (Fig. 14.2-32, bottom left) or less (Fig. 14.2-32,
bottom right).
Further comparisons were made regarding the re-
spective length of the paths and the time required for
their computation. The ratio of CC over RS paths’
Fig. 14.2-32 RS (in grey) versus CC paths (in black).
lengths were computed for 100 pairs of (initial, goal)
configurations. The results obtained are summarized in
Table 14.2-1. In most cases (82 per cent), CC paths are
developed so far. It has been proposed in Fraichard et al. only about 10 per cent longer than RS paths. Similar
(1999). Since the conjectured irregularity of the optimal experiments were carried out for the computation time.
paths for the CC car leaves little hope to ever have The running time of both Steer CC and Steer RS are of the
a steering method for the CC car that finds out the optimal same order of magnitude
path between two configurations, Fraichard et al. have de- (Table 14.2-2). Given that continuous curvature paths
veloped a steering method Steer CC that computes can be tracked with a much greater accuracy by a real car-
admissible paths derived from the optimal paths for the RS like vehicle (see the experimental results obtained in
car. Scheuer and Laugier, 1998), the results reported herein
The paths computed by Steer CC are similar to those demonstrate the interest of CC paths (about the same
computed by Steer RS but, in order to ensure curvature computation time and same length).
continuity, the circular arcs are replaced by transitions
called CC turns whose curvature varies continuously
from 0 up and then down back to 0. ACC turn is made up Acknowledgements
of three parts: (a) a clothoid arc of sharpness s ¼ s max
whose curvature varies from 0 to K max , (b) a circular arc of This work was partially supported by the Eureka EU-45
radius 1=k max and (c) a clothoid arc of sharpness s European project Prometheus, the Inria-lnrets French
whose curvature varies from K max to 0 (Fig. 14.2-31). programme Praxite `le, the Inco-Copernicus European
The paths computed by Steer CC are not optimal but, project Multi-agent robot systems for industrial applica-
based upon the result already established in Scheuer tions in the transport domain and the French research
and Laugier (1998) for the forward CC car, it is programme La route automatise ´e.
conjectured that they are suboptimal, i.e. longer than The authors would like to thank J. Hermosillo,
the optimal path of no more than a given constant. This F. Large, E. Gauthier, Ph. Garnier and 1. Paromtchik for
result is yet to be demonstrated however. their invaluable contributions.
469