
Page 99 - Autonomous Mobile Robots
P. 99
82 Autonomous Mobile Robots
Ground 90 40
truth 120 60
30
150 20 30
10
180 0
210 330
Target presence
240 300 probability
270 CA-CFAR
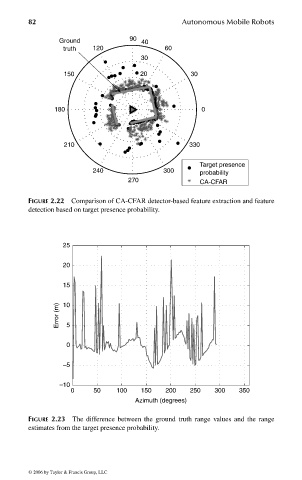
FIGURE 2.22 Comparison of CA-CFAR detector-based feature extraction and feature
detection based on target presence probability.
25
20
15
Error (m) 10
5
0
–5
–10
0 50 100 150 200 250 300 350
Azimuth (degrees)
FIGURE 2.23 The difference between the ground truth range values and the range
estimates from the target presence probability.
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c002” — 2006/3/31 — 17:29 — page 82 — #42