
Page 320 - Biomedical Engineering and Design Handbook Volume 1, Fundamentals
P. 320
ELECTROMYOGRAPHY AS A TOOL TO ESTIMATE MUSCLE FORCES 297
gain so that neural activation does not exceed 1, and to ensure this, the following condition must
be satisfied.
−
αβ − β = 1 (12.4)
2
1
There is a nonlinear relationship between stimulation frequency and force for single motor units
(Woods and Bigland-Ritchie, 1983), and this nonlinearity can be offset by other factors such as the
recruitment of small motor units at low force levels and larger ones at higher levels (i.e., the size prin-
ciple). Muscle activation can be expressed as a function of neural activation, u(t), using a logarith-
mic function instead of a power function for low values and a linear function for high values (Manal
and Buchanan, 2003).
∼
at() = d ln( c ut()+1 ) 0 ≤ ut() < 0 .3
⋅
(12.5)
. ≤
at() = m ut()+ b 03 u(() <1
⋅
t
where u(t) is the neural activation and a(t) is the muscle activation. The coefficients c, d, m, and b
can be solved and reduced to a single parameter, A. Then the parameter A is used to characterize the
curvature of the relationship. It varies from 0.0 to approximately 0.12.
12.4.3 Muscle Contraction Dynamics Model
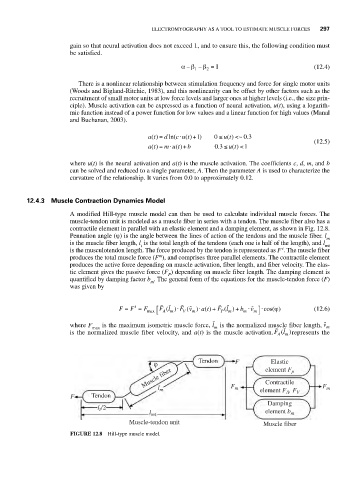
A modified Hill-type muscle model can then be used to calculate individual muscle forces. The
muscle-tendon unit is modeled as a muscle fiber in series with a tendon. The muscle fiber also has a
contractile element in parallel with an elastic element and a damping element, as shown in Fig. 12.8.
Pennation angle (ϕ) is the angle between the lines of action of the tendons and the muscle fiber. l
m
is the muscle fiber length, l is the total length of the tendons (each one is half of the length), and l
t mt
t
is the musculotendon length. The force produced by the tendon is represented as F . The muscle fiber
m
produces the total muscle force (F ), and comprises three parallel elements. The contractile element
produces the active force depending on muscle activation, fiber length, and fiber velocity. The elas-
tic element gives the passive force (F ) depending on muscle fiber length. The damping element is
P
quantified by damping factor b . The general form of the equations for the muscle-tendon force (F)
m
was given by
(
t
F = F = F max ⎣ ⎡ F l() ⋅ F v ) ⋅ a t + F l() + b ⋅⋅ v m ⎤⋅cos( )ϕ (12.6)
(
)
⎦
m
m
P
m
A
m
V
where F max is the maximum isometric muscle force, l m is the normalized muscle fiber length, v m
is the normalized muscle fiber velocity, and a(t) is the muscle activation.Fl() represents the
A
m
ϕ Tendon F Elastic
Muscle fiber F element F p F
Contractile
A
F Tendon l m m element F , F V m
Damping
l /2
t
l mt element b m
Muscle-tendon unit Muscle fiber
FIGURE 12.8 Hill-type muscle model.