
Page 418 - Biomedical Engineering and Design Handbook Volume 2, Applications
P. 418
396 SURGERY
matching them to their corresponding location on the model. Intraoperative navigation allows for
less invasive surgery and more precise localization without the need of repeated intraoperative x-ray
or ultrasound two-dimensional imaging. For example, to perform a biopsy of a tumor on the brain,
the surgeon directs the instrumented drill on the patient’s skull with the help of the images, and drills
directly toward the tumor instead of making an incision on the skull and visually looking for the
tumor.
The key technical enabling factors that led the development of CIS systems were the increasing
availability of powerful imaging modalities, such as CT, MRI, NMT, and live video, powerful com-
puters with graphics capabilities, novel algorithms for model construction and navigation, and inte-
grative systems and protocol development. This article reviews the main technical issues of CIS
systems. It is organized as follows: The next section presents an overview of CIS systems, their main
elements architecture, and information flow. The following section describes the main enabling tech-
nologies of CIS systems: imaging devices, image processing, visualization and modeling, preopera-
tive analysis and planning, registration, tracking and sensing, robotics, human-machine interfaces,
and systems integration technology. Then, we describe in detail examples of CIS systems, including
navigation systems, augmented reality navigation systems, and virtual reality systems. We conclude
with perspectives and possible directions for future development.
14.2 AN OVERVIEW OF CIS SYSTEMS
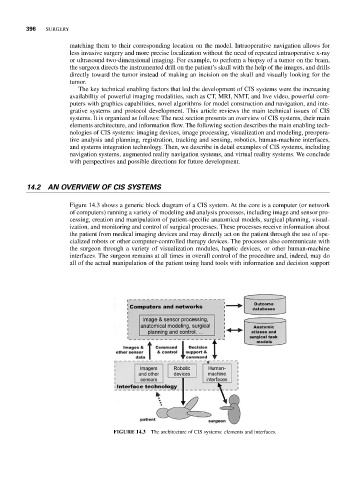
Figure 14.3 shows a generic block diagram of a CIS system. At the core is a computer (or network
of computers) running a variety of modeling and analysis processes, including image and sensor pro-
cessing, creation and manipulation of patient-specific anatomical models, surgical planning, visual-
ization, and monitoring and control of surgical processes. These processes receive information about
the patient from medical imaging devices and may directly act on the patient through the use of spe-
cialized robots or other computer-controlled therapy devices. The processes also communicate with
the surgeon through a variety of visualization modules, haptic devices, or other human-machine
interfaces. The surgeon remains at all times in overall control of the procedure and, indeed, may do
all of the actual manipulation of the patient using hand tools with information and decision support
FIGURE 14.3 The architecture of CIS systems: elements and interfaces.