
Page 423 - Biomedical Engineering and Design Handbook Volume 2, Applications
P. 423
COMPUTER-INTEGRATED SURGERY AND MEDICAL ROBOTICS 401
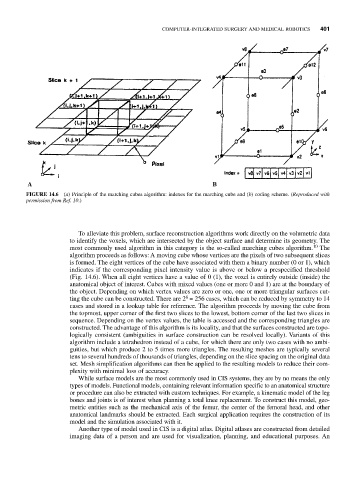
FIGURE 14.6 (a) Principle of the marching cubes algorithm: indexes for the marching cube and (b) coding scheme. (Reproduced with
permission from Ref. 10.)
To alleviate this problem, surface reconstruction algorithms work directly on the volumetric data
to identify the voxels, which are intersected by the object surface and determine its geometry. The
most commonly used algorithm in this category is the so-called marching cubes algorithm. 10 The
algorithm proceeds as follows: A moving cube whose vertices are the pixels of two subsequent slices
is formed. The eight vertices of the cube have associated with them a binary number (0 or 1), which
indicates if the corresponding pixel intensity value is above or below a prespecified threshold
(Fig. 14.6). When all eight vertices have a value of 0 (1), the voxel is entirely outside (inside) the
anatomical object of interest. Cubes with mixed values (one or more 0 and 1) are at the boundary of
the object. Depending on which vertex values are zero or one, one or more triangular surfaces cut-
8
ting the cube can be constructed. There are 2 = 256 cases, which can be reduced by symmetry to 14
cases and stored in a lookup table for reference. The algorithm proceeds by moving the cube from
the topmost, upper corner of the first two slices to the lowest, bottom corner of the last two slices in
sequence. Depending on the vertex values, the table is accessed and the corresponding triangles are
constructed. The advantage of this algorithm is its locality, and that the surfaces constructed are topo-
logically consistent (ambiguities in surface construction can be resolved locally). Variants of this
algorithm include a tetrahedron instead of a cube, for which there are only two cases with no ambi-
guities, but which produce 2 to 5 times more triangles. The resulting meshes are typically several
tens to several hundreds of thousands of triangles, depending on the slice spacing on the original data
set. Mesh simplification algorithms can then be applied to the resulting models to reduce their com-
plexity with minimal loss of accuracy.
While surface models are the most commonly used in CIS systems, they are by no means the only
types of models. Functional models, containing relevant information specific to an anatomical structure
or procedure can also be extracted with custom techniques. For example, a kinematic model of the leg
bones and joints is of interest when planning a total knee replacement. To construct this model, geo-
metric entities such as the mechanical axis of the femur, the center of the femoral head, and other
anatomical landmarks should be extracted. Each surgical application requires the construction of its
model and the simulation associated with it.
Another type of model used in CIS is a digital atlas. Digital atlases are constructed from detailed
imaging data of a person and are used for visualization, planning, and educational purposes. An