
Page 444 - Biomedical Engineering and Design Handbook Volume 2, Applications
P. 444
422 SURGERY
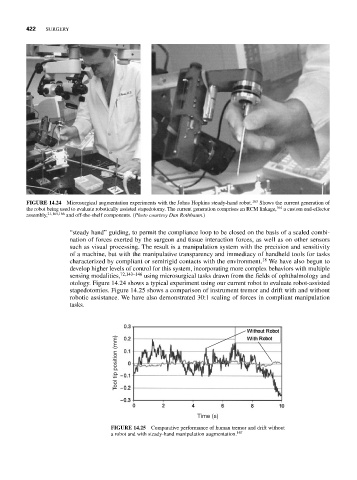
FIGURE 14.24 Microsurgical augmentation experiments with the Johns Hopkins steady-hand robot. 163 Shows the current generation of
the robot being used to evaluate robotically assisted stapedotomy. The current generation comprises an RCM linkage, 164 a custom end-effector
assembly, 21,165,166 and off-the-shelf components. (Photo courtesy Dan Rothbaum.)
“steady hand” guiding, to permit the compliance loop to be closed on the basis of a scaled combi-
nation of forces exerted by the surgeon and tissue interaction forces, as well as on other sensors
such as visual processing. The result is a manipulation system with the precision and sensitivity
of a machine, but with the manipulative transparency and immediacy of handheld tools for tasks
characterized by compliant or semirigid contacts with the environment. 18 We have also begun to
develop higher levels of control for this system, incorporating more complex behaviors with multiple
sensing modalities, 72,143–146 using microsurgical tasks drawn from the fields of ophthalmology and
otology. Figure 14.24 shows a typical experiment using our current robot to evaluate robot-assisted
stapedotomies. Figure 14.25 shows a comparison of instrument tremor and drift with and without
robotic assistance. We have also demonstrated 30:1 scaling of forces in compliant manipulation
tasks.
Tool tip position (mm)
Time (s)
FIGURE 14.25 Comparative performance of human tremor and drift without
a robot and with steady-hand manipulation augmentation. 167