
Page 210 - Build Your Own Quadcopter_ Power Up Your Designs with the Parallax Elev-8
P. 210
Chapter 7: Ser v o Motors and Extending the Ser v o Control System 189
Figure 7.27 Concept sketch for the tilting platform.
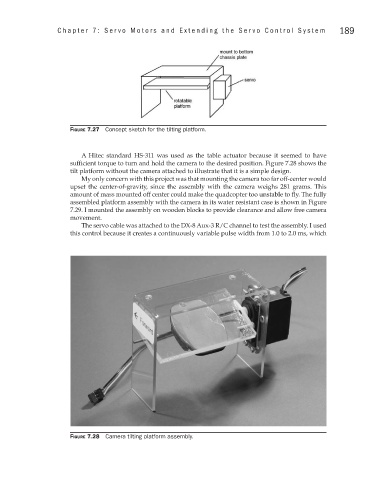
A Hitec standard HS-311 was used as the table actuator because it seemed to have
sufficient torque to turn and hold the camera to the desired position. Figure 7.28 shows the
tilt platform without the camera attached to illustrate that it is a simple design.
My only concern with this project was that mounting the camera too far off-center would
upset the center-of-gravity, since the assembly with the camera weighs 281 grams. This
amount of mass mounted off center could make the quadcopter too unstable to fly. The fully
assembled platform assembly with the camera in its water resistant case is shown in Figure
7.29. I mounted the assembly on wooden blocks to provide clearance and allow free camera
movement.
The servo cable was attached to the DX-8 Aux-3 R/C channel to test the assembly. I used
this control because it creates a continuously variable pulse width from 1.0 to 2.0 ms, which
Figure 7.28 Camera tilting platform assembly.