
Page 73 - CNC Robotics
P. 73
CNC Robotics
51 SGS-1HOMSON
~l ~D©IRJ@~n,rn©1J'IRJ@(Kl]IJ©® APPLICATION NOTE
STEPPER MOTOR DRIVER CO NSIDERATIONS
COMMON PROBLEMS & SOLUTIONS
by Thoma s L Hopkins
This note explains how to avoid same of the more common pitfalls in motor drive design. It is
basedon the author's expenence tn responding to enquiries from the field.
INTRODUCTION Bipolar driven motors. In the past unipolar motors
were common and preferred for their simple drive
Over the years while working with stepper motor configurations. However, with the advent of cost
use rs. many of the same questions keep occur- effective integrated drivers, bipolar motors are
ring from novice as well as experienced users of now more comrmn. These bipolar motors typi -
stepper motors. Th is application note is intend ed cally produce a higher torque in a given form fac-
as a collection of answers to comroonly asked tor [lJ.
questions about stepper motors and driver de-
sign. In addition the reference list contains a num-
ber of other application notes, book s and art icles Drive Topology Selection
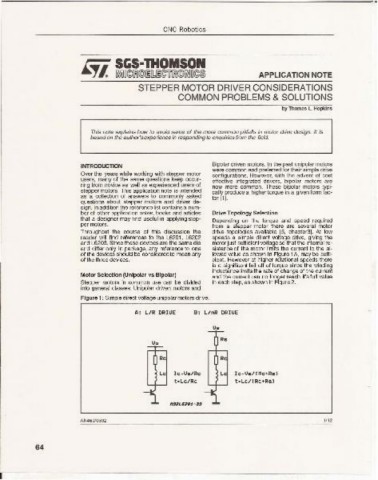
that a designer may find useful in applyi ng step- Depending on the torque and speed required
per motors.
from a stepper motor there are several motor
Throughout the course of this discussion the drive topologies available [5, chapter3]. At low
reader will find references to the L6201 , L6202 speeds a simple direc t voltage drive, giving the
and L6203. Since these devices are the same die motor just sufficient voltage so that the interna l re-
and differ only in package, any reference to one sistance of the motor limits the current to the al-
of the devices should be considered to mea n any lowed value as show n in Figure 1A, may be suffi-
of the three devices. cient. However at higher rotational speeds there
is a significant fall off of torque since the winding
inductance limits the rate of change of the curr ent
Motor Selection (Unipolar vs Bipolar)
and the current can no longer reach it's full value
Stepper motors in common use can be divided in each step , as show n in Figure 2.
into general classes, Unipolar driven motors and
Figure 1: Simple direct voltage unipolar motors drive.
A: L/A DAIVE B: l /nR DRIVE
V.
;::1=- -I--
Ac Ac
Lc Ic-Us/ Rc Lc Ic-Ue/ tRc"Ra )
t-Lc/ Rc t.Lc/ CRctRa)
-I--
--t;;
"'~L.~.t ·3' .....
AN46010392 1/ 12
64
r- - - - - - - - - - - - - - - - - - - - - - -