
Page 69 - CNC Robotics
P. 69
CNC Robotics
APPLIC ATION NOTE
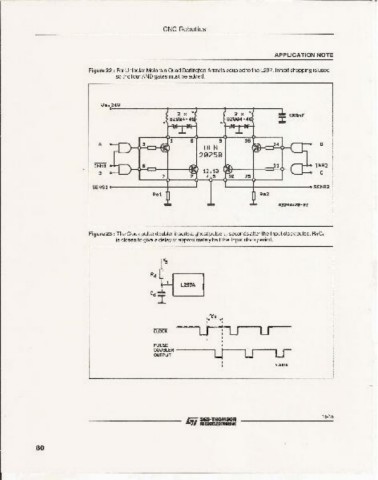
Figure 22 : ForUnipolar Motors a Quad Darlington Arrayis coupledto the L297. Inhibitchopping is used
so the four AND gates must be added.
Ue .24U
2 x •
2 x •
. BZIJU ~ Ae . 9Z"a' -' 9 :E laanF
-.J. ~J.
~ 6 2975B b- p- 11 ~
A 3 ~ 1 • ULN 9 16 b 14 D
••
2 i 12. 13 P,'a i . r
SENSi SEN52
R.1 • • 2
• I. .j" . j" 1192ANJ;1. ·.t
Figure 23 : The Cbc k pulse doublerinserts a ghost pulse 'to secondsafter the Input clock pulse. AdCd
is clasento give a delay of approximatelyhalf the Input clockperiod.
ir-.
R d
l297A
T
dI
C
..!2.... ,
,
~L~ ,
DOUaLER ----1 It---U
OUTPUT '-'
15f18
60